卷积神经网络(Convolutional Neural Network)基础。
问题设定 (1)
训练数据为一组带标签的样本。
- 对象:在图像识别中,通常是固定大小的图像,例如 $100 \times 100 \times 3$ 的 RGB 图像。其中 3 表示颜色通道(channel)数;灰度图像的 channel 数为1;
- 标签:通常用 one-hot 向量表示类别,维度等于类别总数;
- 样本:图片及其标签;
任务:训练一个图像识别神经网络。
最初想法 (2)
在分类问题中,已经构建了这样一个神经网络(可能多个隐藏层,图中未画出):
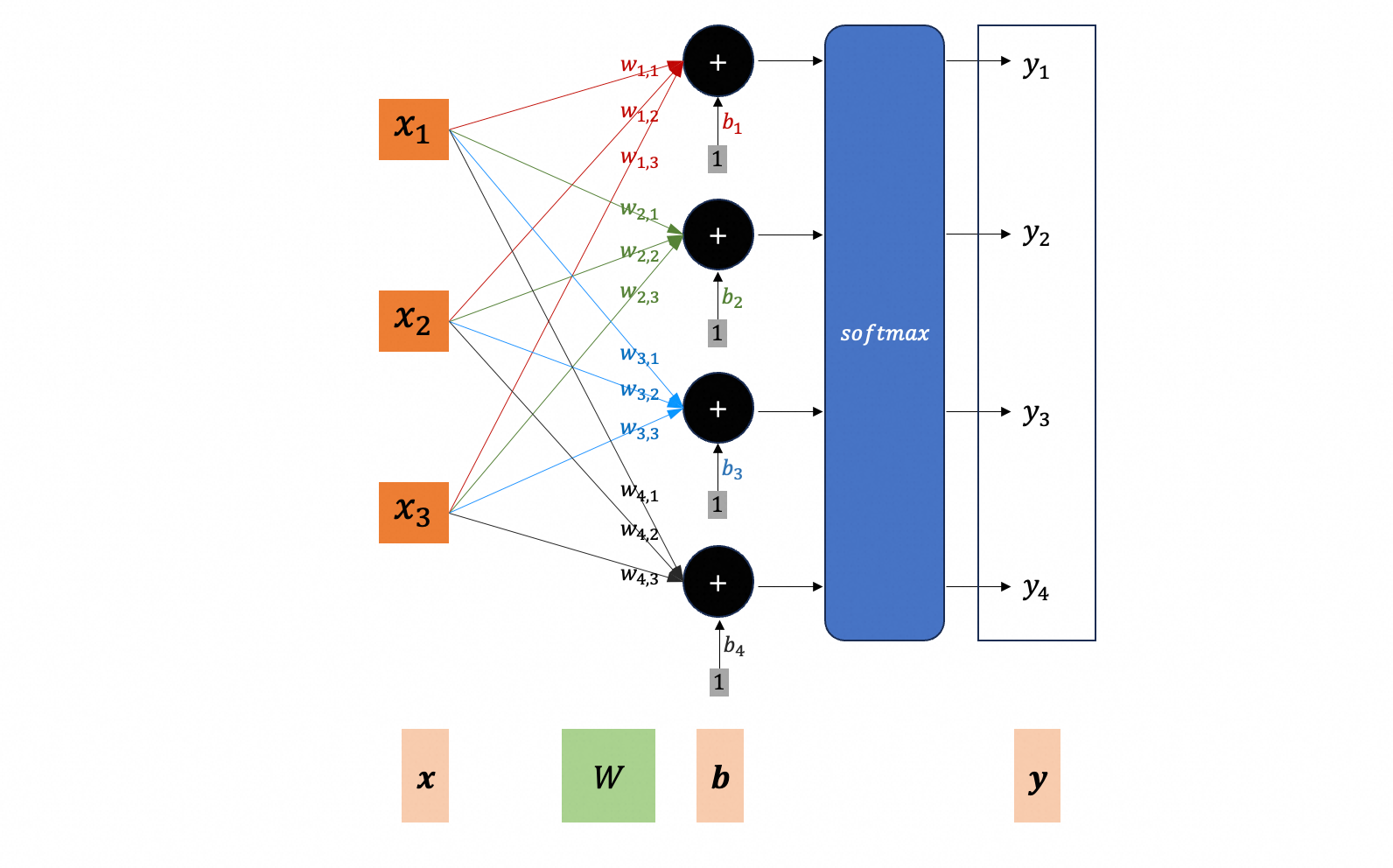
直接把图片代入 $\boldsymbol{x}$ 不就可以了吗?也就是把 $100 \times 100 \times 3$ 的图片看成 30000 维的向量,送入神经网络,通过梯度下降最小化交叉熵,……
这是一个 fully connected network,它是一个通用的模型,但对于图像识别有一些问题:
- 首先,参数比较多,例如第一层有 1000 个 neuron,就会有 $100 \times 100 \times 3 \times 1000 = 3 \times 10^7$ 个权重参数。
- 其次,模型弹性很大,增加 overfitting 的风险。
- 另外,这种做法将图像展平为向量,完全忽略了像素之间的空间局部性(如相邻像素相关性强),而这种局部结构对图像识别至关重要。
针对图像识别的优化 (3)
Receptive Field (3.1)
人类对于图像的识别,是基于一些关键特征(critical patterns)的,例如根据眼睛、鼻子、嘴巴、耳朵等特征判断图像是一只猫。机器也是这样。
既然一个 critical pattern 只是图片的一小部分,就没有必要让每个 neuron 都“观察”整张图片。相反,每个 neuron “观察”一个很小的范围就可以了。也就是说,每个 neuron 的输入是图片的一部分,而不是整张图片。这就是第一个优化。
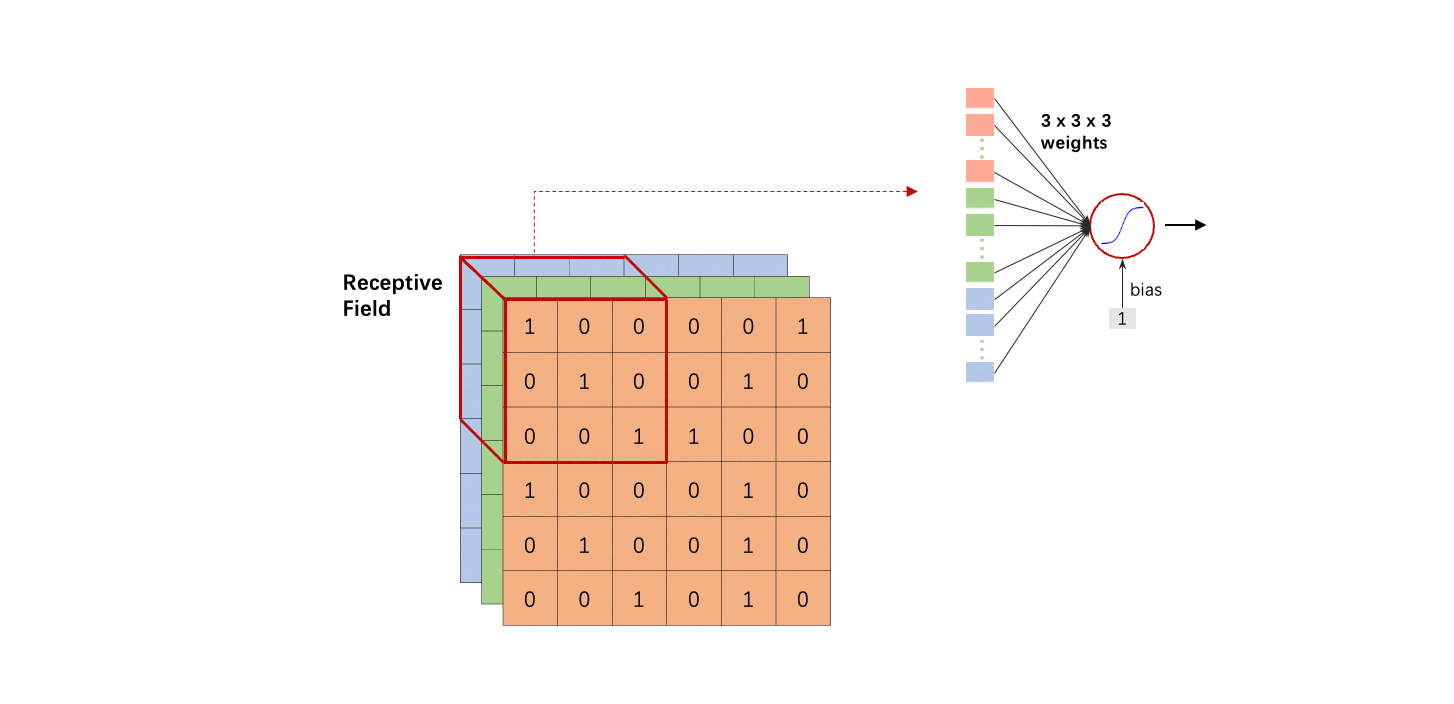
图片的一个部分叫做一个 receptive field;而一个 neuron 只“观察”一个 receptive field。
关于 receptive field 的选择,有很大的灵活性:
- 彼此可以重叠(overlap);
- 多个 neuron 可以“观察”同一个 receptive field;
- 大小可以自己选择:可以不是正方形,多个 receptive field 的大小可以不同;
- 可以只包含部分 channel;
- 甚至可以不连续(例如包含左上角的一些像素和右下角的一些像素);
但典型设置是:
- receptive field 通常包含所有channel;
- 大小通常是 $3 \times 3$,叫做 kernel size(注意 kernel size 不包含 channel 数,即不是 $3 \times 3 \times 3$)。问题:critical pattern 的大小超过 $3 \times 3$,会导致识别不到吗?不会,后文会解释;
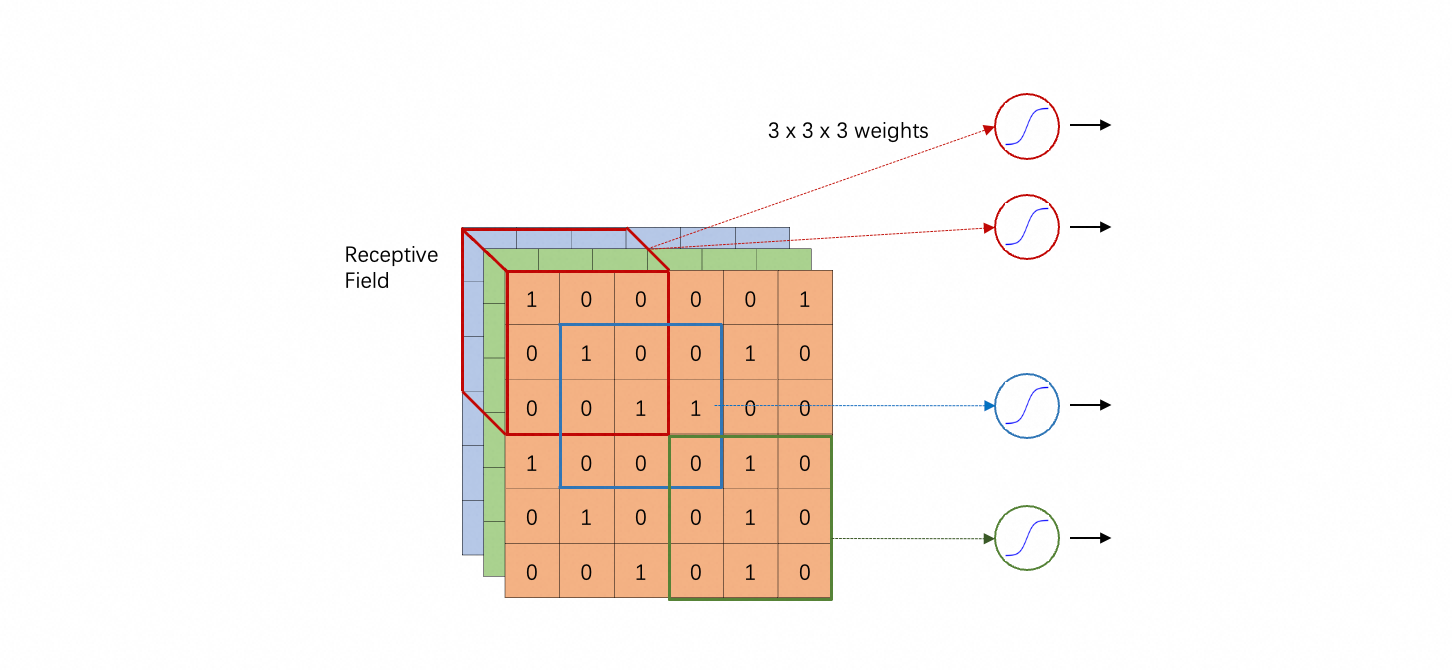
- 同一个 receptive field 会有一组 neuron 去“观察”,例如 64 个或 128 个;
- receptive field 高度重叠:把一个 receptive field 往右或者往下移动一个距离,就得到一个新的 receptive field;移动的距离叫 stride(hyper-parameter);stride 一般不会设置太大,通常1或2(否则可能跳过了 critical pattern);若 stride 大于 1,移到边缘可能需要 padding;
- 按上述方式,扫过图片所有区域;
Parameter Sharing (3.2)
同样的 pattern 可能出现在图片的不同位置:例如猫的眼睛,可能出现在图片左上角,也可能出现在右下角……
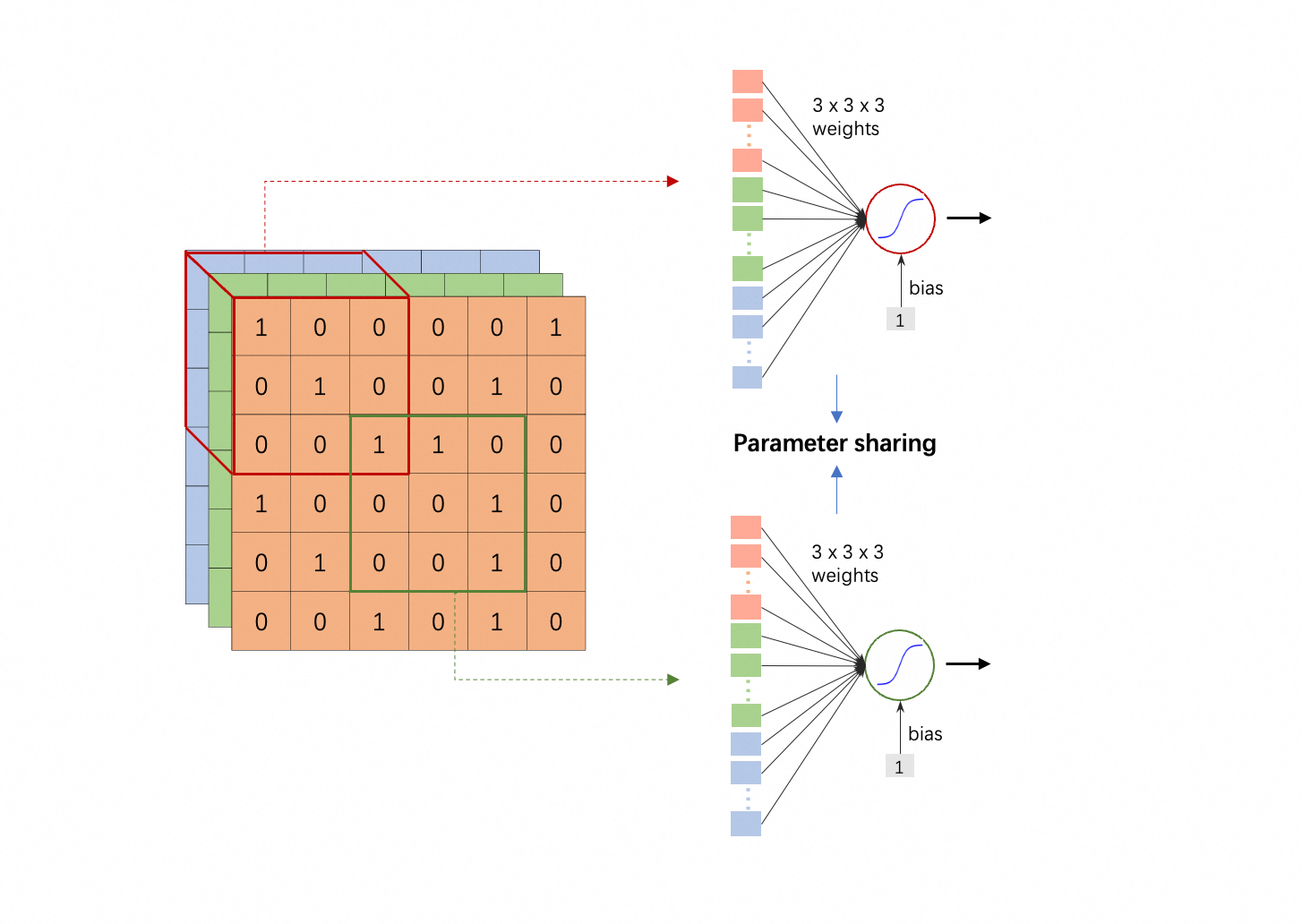
这也不是问题,因为每个 receptive field 都有 neuron 去“观察”。然而,左上角识别眼睛的 neuron 和右下角识别眼睛的 neuron 做的事情是一样的,何不让它们共享参数 (sharing parameter)?就是那两个 neuron 的 weights 和 bias 是一样的。这就是第二个优化。
注意:
- 共享参数的那两个 neuron 参数是一模一样的,每个 $w_i$ ($i=1, 2, \dots, 27$)和 $b$ 都对应相等。
- 但它们的输出不一样,因为输入不一样(“观察”不同的 receptive field)。
- 这也告诉我们,“观察”同一个 receptive field 的 neuron 不能共享参数(否则输出一定一样)。
参数共享的方式也有很大灵活性,但典型设置是:
- “观察”每个 receptive field 的 neuron 数量相同,例如 64 个或 128 个;
- “观察”不同 receptive field 的 neuron 组,一一对应共享参数,如下图所示(相同颜色的 neuron 彼此共享参数);
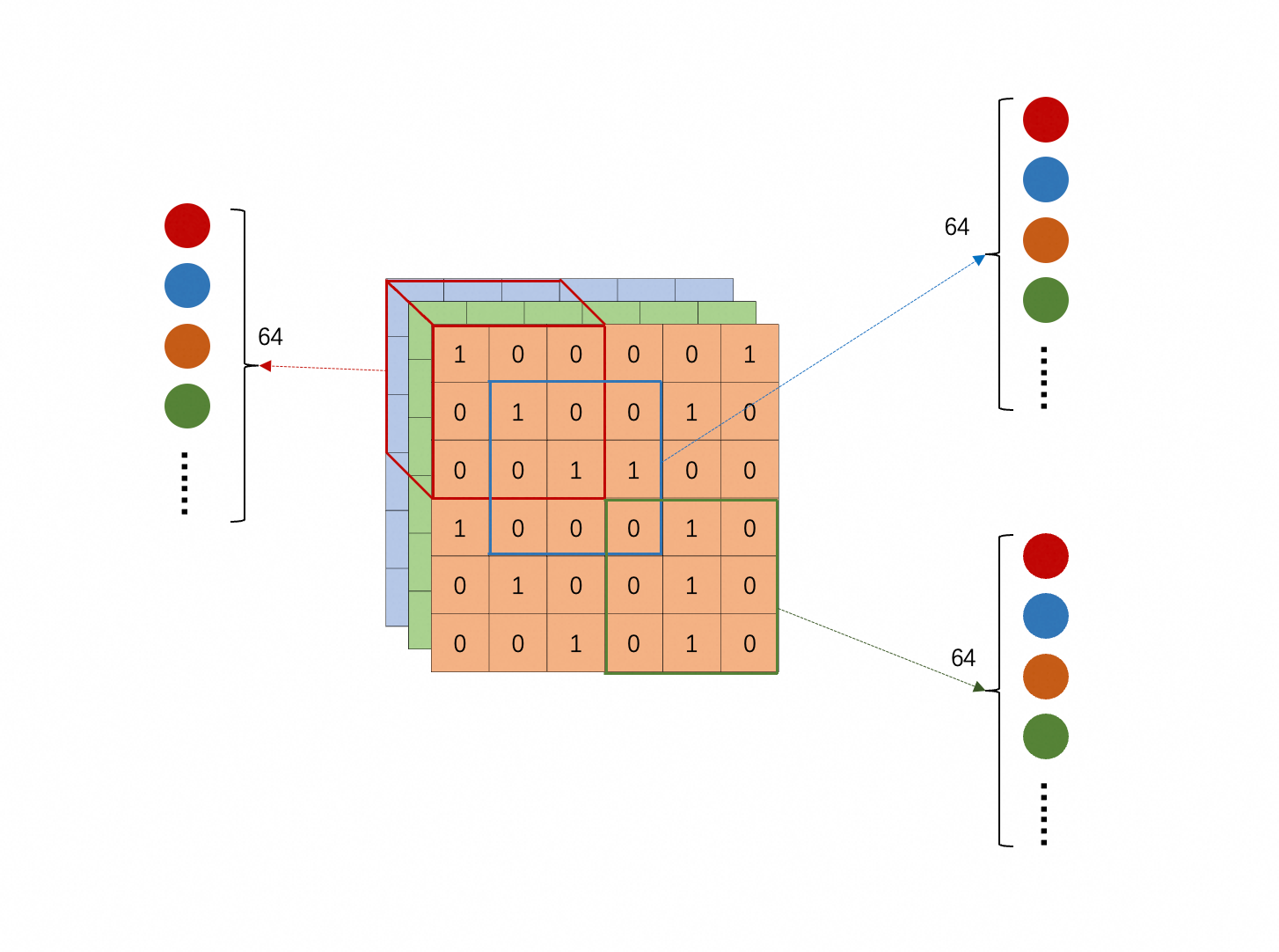
图片有多少个 receptive field 就有多少个 neuron 共享同一组参数(包括权重和偏置)。这一组参数叫做一个 filter。另一方面,filter 的个数和“观察”一个 receptive field 的 neuron 个数相等,例如 64 个或 128 个。
后文还会从 filter 的视角重新解释神经网络。
卷积神经网络 (3.3)
在 fully connected network 中,每个 neuron 的输入都是整张图片,故弹性最大。容易证明,只要每个 neuron “观察”一部分,把其它权重都设置为0,就退化成 带优化1的版本(只“观察” receptive field)。所以,前者是后者的超集,后者的弹性小于前者。
在 receptive field 的基础上,进一步限制弹性:学习的时候,要保持参数共享的约束,不能随意调整。
Receptive field 与 parameter sharing 合起来,就构成 convolutional layer;包含 convolutional layer 的网络,就是 convolutional neural network(CNN, 卷积神经网络)。
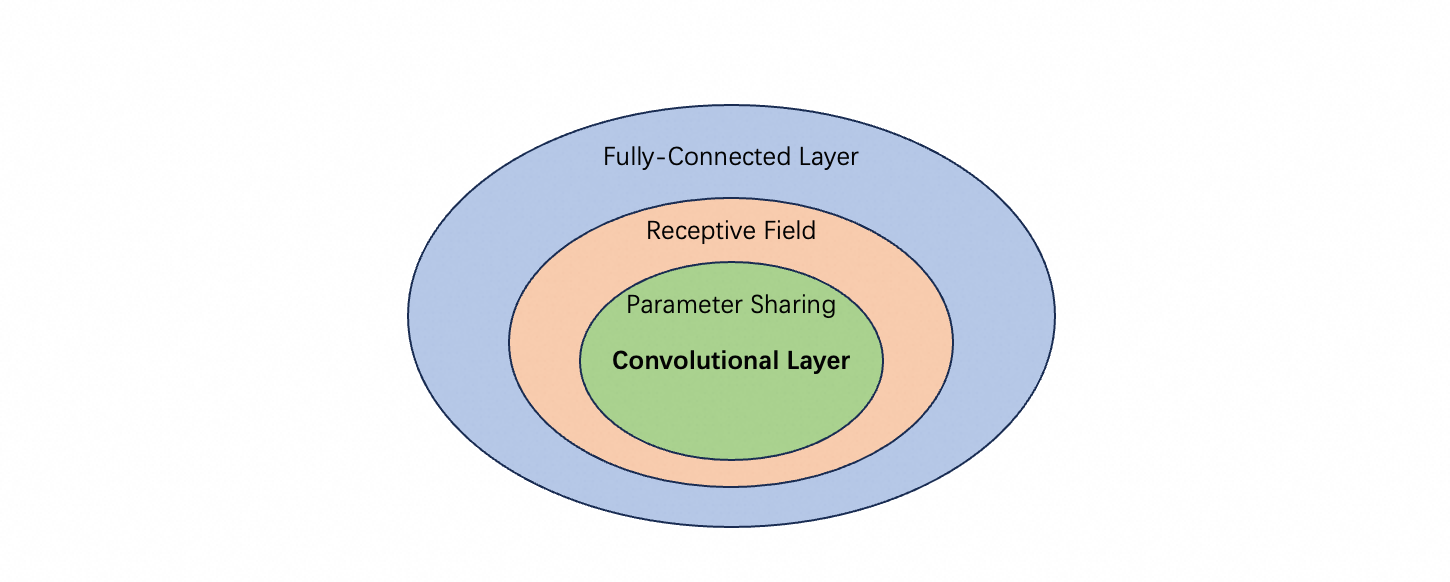
从上图可知,CNN 的 model bias 比较大;但这些 model bias 都是基于对图像识别任务的理解人为引入的,是为图像识别定制的。可以这么理解,fully connected network 弹性最大,是一个全能的网络,但它在具体一个特定领域通常不是最好的。
从 Filter 的角度看CNN (4)
本节是解释 CNN 的另一个版本。可以不看上面的版本,直接看这一节。不过,个人觉得上面的版本更偏向于训练角度;本节的版本更偏向于推理。
卷积神经网络包含一组 filter,就是被多个 neuron 共享的参数(见前文);一个 filter 可以派生出多个 neuron (但不以 neuron 为第一视角;提 neuron 的主要目的是为了理解两个版本是等价的)。
一个 filter 以固定步长(stride)在输入图像上滑动,遍历所有局部区域,从每个区域提取 pattern。这一过程称为 “对输入图像进行卷积”(convolve over the input image),也是“卷积神经网络”名称的由来。(对应之前的版本:一个 filter 派生出多个 neuron,每个 neuron “观察”一个 receptive field)。
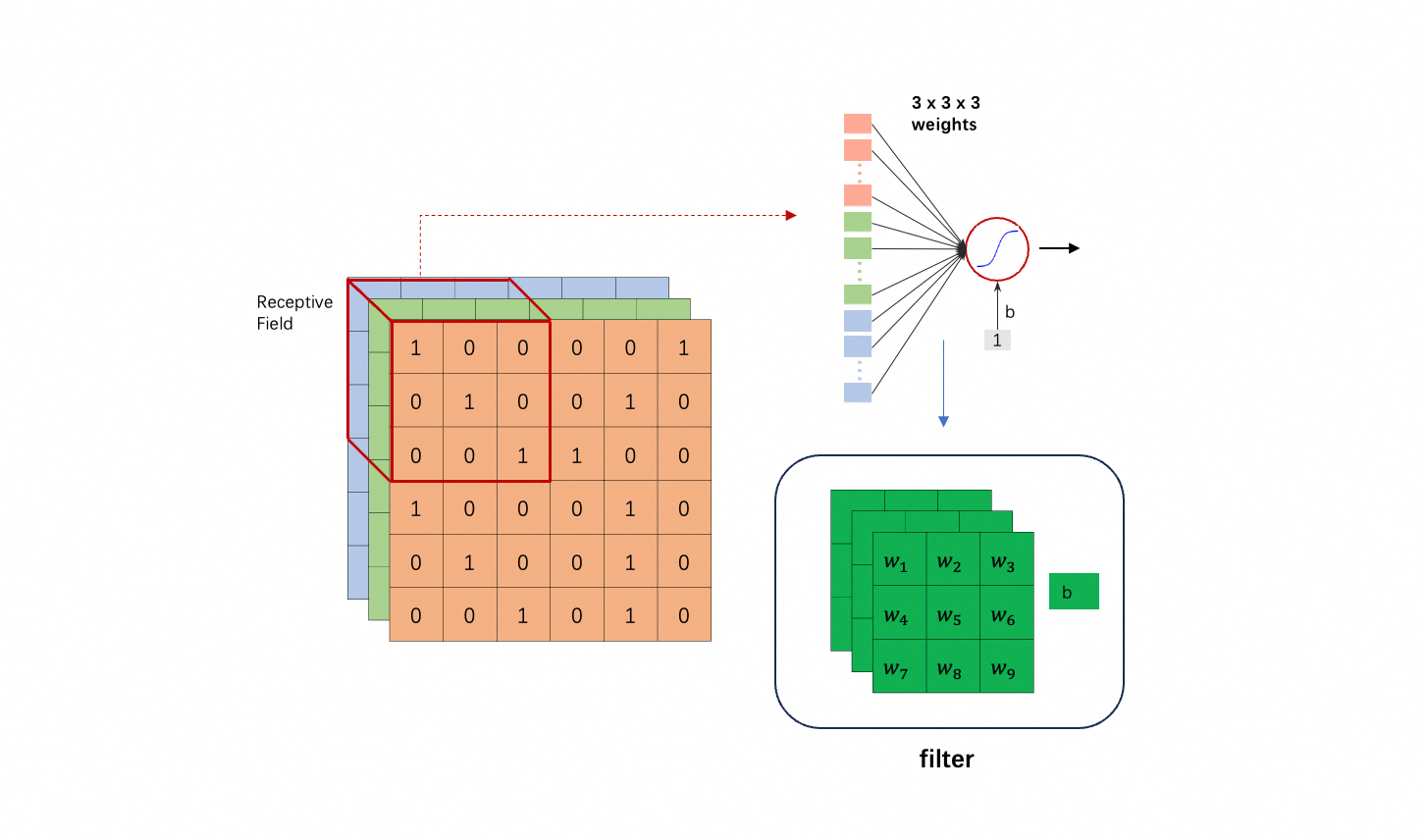
如何提取?从计算公式看,和 neuron 的计算一模一样。
filter 就是多个 neuron 共享的参数;以 $\text{KernelSize} = 3 \times 3$ 且图片有 3 个channel 为例,filter 就包含 27 个 weight 值($w_i$,$i = 1, 2, \dots, 27$)和一个偏置 $b$;
抓取 pattern 就是 filter 和图片上的一个区域做内积:
$$
w_1 p_1 + w_2 p_2 + \dots + w_{27} p_{27} + b = \sum_{i=1}^{27} w_i p_i + b
$$
其中 $p_i$ 表示图片区域的像素数据,$i = 1, 2, \dots, 27$;从 neuron 的角度,就是计算输出的公式。
下面假设 channel 为 1,stride 为 1,且忽略 $b$,说明 filter 如何工作。
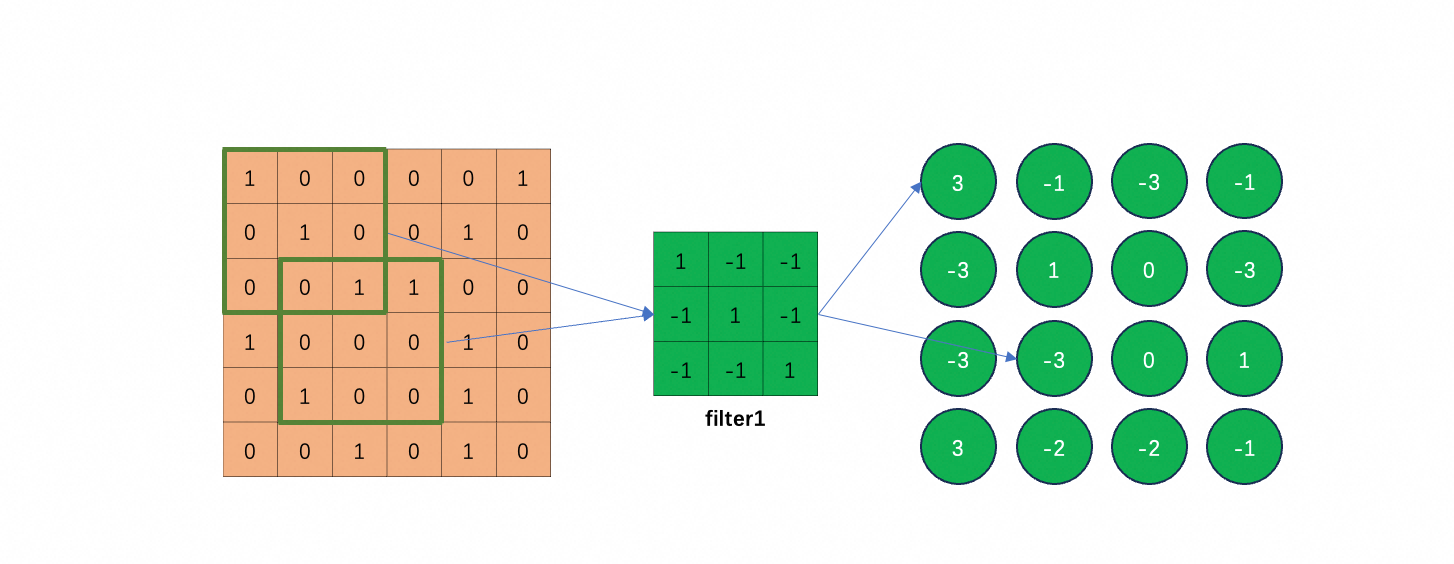
怎么理解“抓取” pattern呢?图中 filter1 的对角线都是 1,其它是 -1;所以它遇到对角线都是 1 的 pattern,输出就最大。图中,左上角和左下角就是这种 pattern。
对每个 filter 重复如上操作:
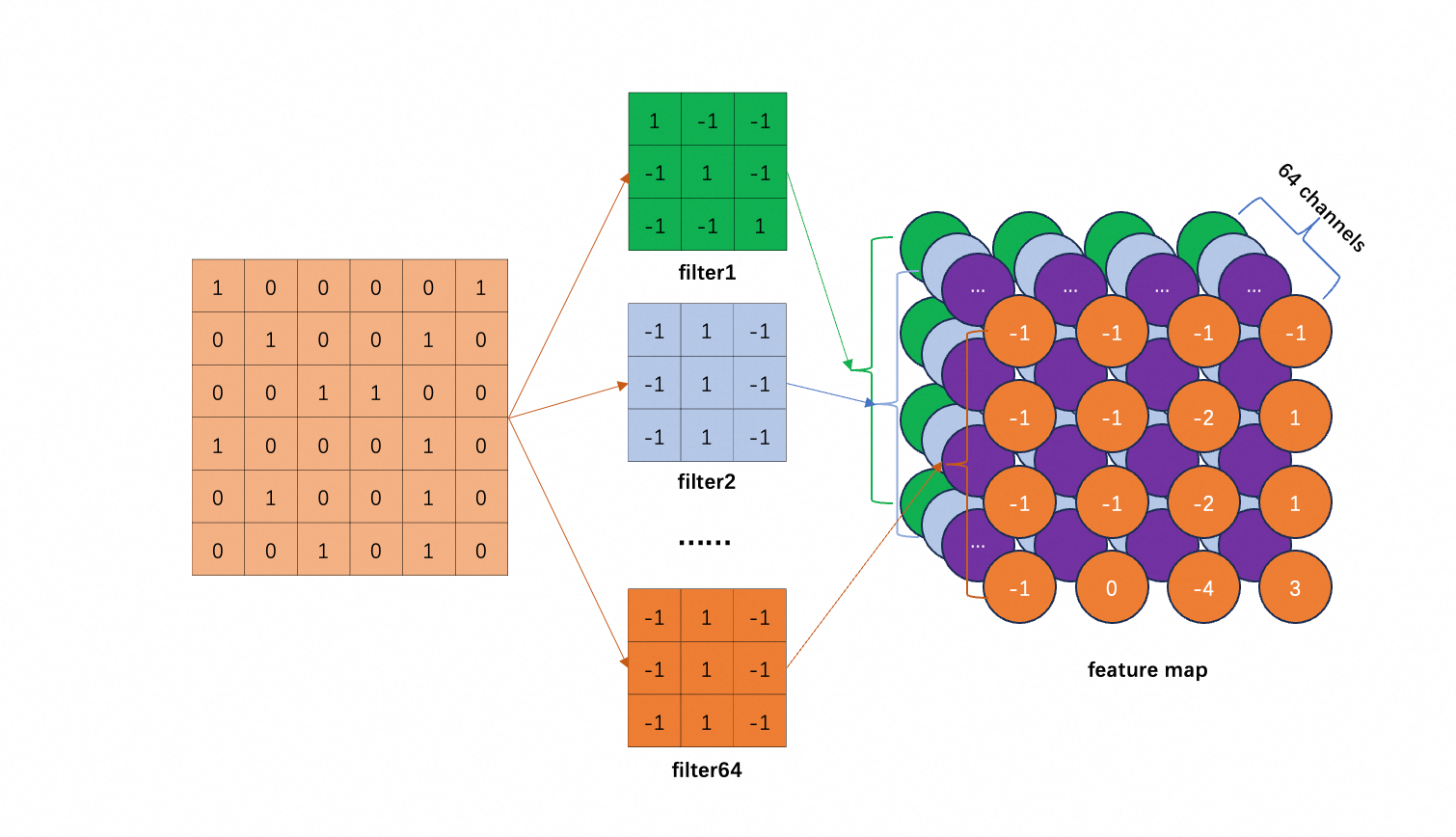
假如有 64 个 filter (观察每个 receptive field 的 neuron 是 64 个),就会产生 64 组数据。这其实又构成一张新的“图像”,叫做 feature map,它有 64 个 channel。
注意,前面假设原始图像的 channel 为 1,feature map 的每个像素点是 $\sum_{i=1}^9 w_i p_i$(忽略了 $b$)。即使原始图像的 channel 为 3,feature map 的 channel 还是 64 而不是 $64 \times 3 = 192$。每个 filter 还是产生一个channel,只是每个像素点是 $\sum_{i=1}^{27} w_i p_i$,(把目标区域 3 个 channel 的所有像素算到 feature map 的一个 channel 的一个点上)。总之,1 个 filter 产生 feature map 的一个 channel。
仔细观察上图,就可以回答第3节遗留的问题了:kernel size 设置为 $3 \times 3$,若 critical pattern 的范围超过此大小,会导致识别不到吗?不会,因为 feature map 中的 $3 \times 3$ 范围对应到原始图像中的 $5 \times 5$ 区域。后文 multiple convolutional layers 叠加,进一步放大这个效果。
两个版本的 story 是完全等价的:
- Neuron Version Story:
- Each neuron only considers a receptive field.
- The neurons with different receptive fields share the parameters.
- Filter Version Story:
- There are a set of filters detecting small patterns.
- Each filter convolves over the input image.
完整的CNN (5)
既然原始图像经过一个 convolutional layer 输出的是另一个“图像”(64 channel 的 feature map),很容易想到把多个 convolutional layers 叠起来。显然,第 $L+1$ 层的 filter 的 channel 数,等于第 $L$ 层的 feature map 的 channel 数(例如64)。
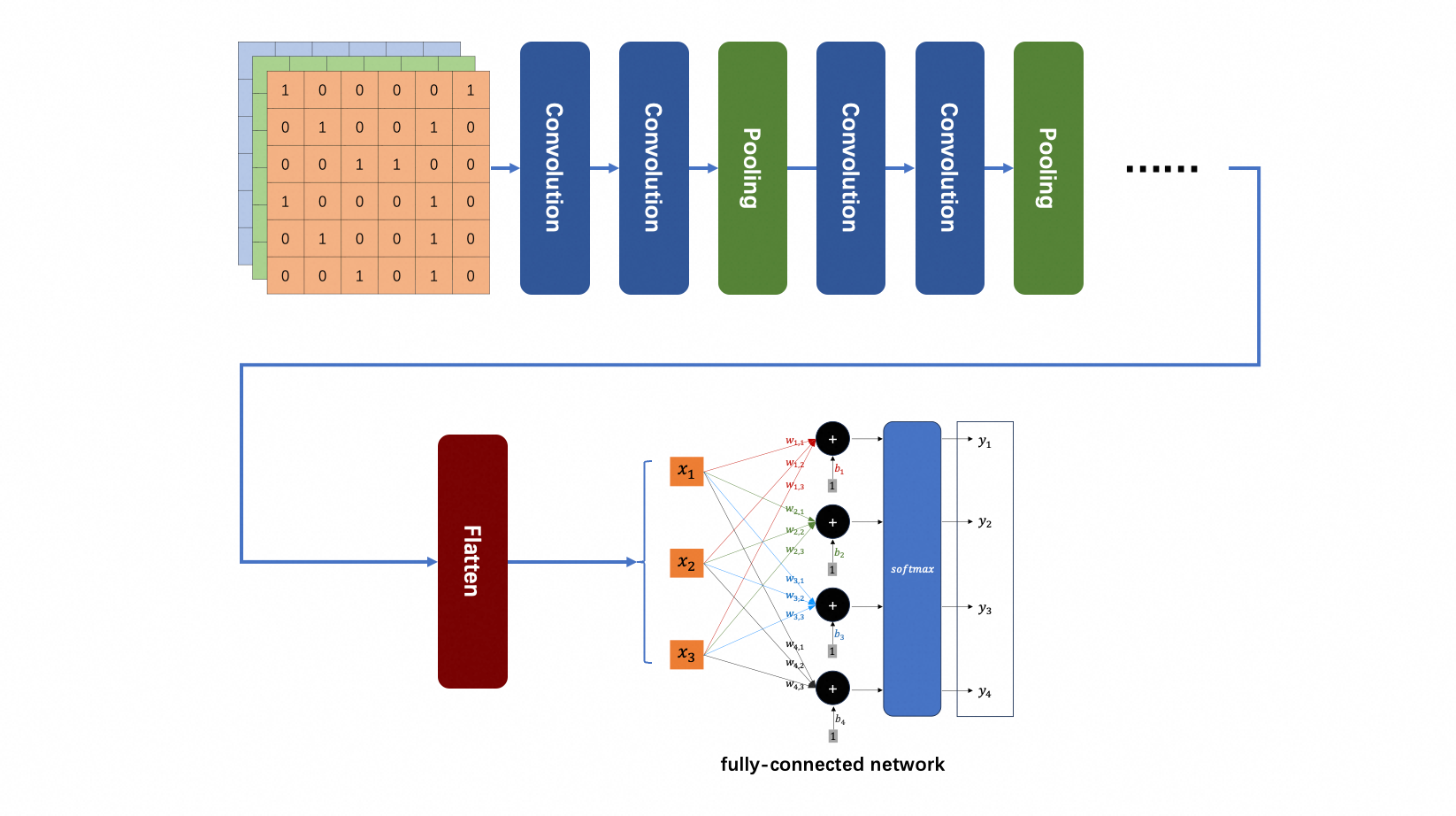
通常几个 convolutional layer 之后还会接一个 pooling 层。Pooling 就是把比较大的 feature map 变小。一张真实的图像,把它的奇数列和奇数行像素都去掉,图像大变成原来的 $\frac{1}{4}$,基本上还保留原来的形状。对于 feature map 也类似,过程是这样的:以 $N \times N$ 为一个单元(例如 $2 \times 2$),取每个单元内的最大值,就得到一张原 feature map 的 $\frac{1}{4}$ 的小 map,这个过程是 max pooling。类似的,也可以取平均数(mean pooling),或者几何平均数等。
可以看出,pooling 层没有参数,相当于一个操作符。
另外,pooling 也不是必须的,甚至可能降低识别准确度。它的主要作用是减少运算量;现在算力越来越强,可以考虑省去 pooling 层。
CNN 的应用 (6)
Alpha Go 就是基于 CNN 设计的。下围棋可以看做是一个分类问题:总共有 $19 \times 19 = 361$ 个类别;输入棋盘的局面,输出下一步落子位置(361个类别中的一个)。
和图像识别有什么共同特性呢?
- some patterns are much smaller than the whole image;
- the same pattern appears in different regions;
注:pooling 不适用:舍弃一些像素(棋盘上的点),局面就会发生重大变化;
所以,下围棋就变成了图像识别:局面的类别,就是在此局面下,下一步落子的位置。
不过,不是真把棋盘局面这个 RGB 图片(3 个 channel)输入到 CNN。围棋的实际局面由一张 $19 \times 19$ 的黑白图片(channel 为 1)表示就够了(例如每个像素上,1表示已落白子,-1表示已落黑子,0表示未落子),但 Alpha Go 的输入图片有 48 channel,即棋盘上的每个点由 48 个数字表示,应该包含这个点周围的局面信息(可能由围棋专家设计)。其它细节:第一个隐藏层 kernel size 是 5;其它隐藏层 kernel size 是 3 等。
小结 (7)
卷积神经网络(CNN)是为图像等具有空间结构的数据量身设计的神经网络架构。它从全连接网络出发,通过引入两个关键的结构化约束,显著提升了模型在图像识别任务上的效率与泛化能力:
局部感受野(Local Receptive Field):每个 neuron 只关注输入图像的一个局部区域,而非整张图。这符合图像的局部相关性假设——相邻像素往往共同构成有意义的模式(如边缘、纹理)。
参数共享(Parameter Sharing):同一特征检测器(即 filter)在整个图像上滑动使用,使得模型对平移具有不变性(translation invariance),并大幅减少参数数量,降低过拟合风险。
这两个机制共同构成了卷积层:一组可学习的 filter 在输入上滑动,生成多通道的 feature map,每一层逐步提取从低级(边缘、角点)到高级(部件、物体)的语义特征。
因此,CNN 并非“能力更弱”的网络(对比fully connected network),而是将人类对图像结构的先验知识编码进模型架构的一种高效设计——用合理的 model bias 换取更强的专项能力。

