生成对抗网络(Generative Adversarial Network)原理。
问题描述 (1)
目标是通过机器学习方法生成“真实人脸图像”。当然,生成的图像不太可能是真实人脸图像,这里“真实”指具有自然摄影风格的人脸(区别于卡通、素描或抽象艺术等非写实风格),图像尺寸为 $100 \times 100$ 的 RGB 图像。
将每张图像视为 $\mathbb{R}^{30000}$ 空间中的一个点(因为 $3 \times 100 \times 100 = 30000$ 个像素),那么:
- 这个空间内绝大多数区域都不是“图像”(绝大多数点都不对应人类可识别的自然图像),虽然任意点在技术上都可以被解释为一个 $100 \times 100$ 的 RGB 图像;
- 所有“真实人脸图像”并非均匀散布在整个 $\mathbb{R}^{30000}$ 空间中,而是高度集中于某个特定区域;
- 尽管该空间维度极高(30000 维),但真实人脸的变化实际上仅由少量语义因素控制,例如:
- 身份(identity)
- 表情(expression)
- 光照条件(illumination)
- 头部姿态(pose)
- 年龄、性别等高层属性
这些因素共同构成了一个远低于 30000 维的隐含自由度空间(通常估计在几十到几百维之间)。因此,所有合理的真实人脸图像实际上嵌入在一个光滑的低维子流形(low-dimensional manifold)上。
类似地,所有“真实猫的图像”也会集中在 $\mathbb{R}^{30000}$ 中另一个不同的低维子流形上。
由于人脸与猫在语义和视觉结构上差异巨大,这两个流形在高维空间中几乎不相交(disjoint supports),对应的概率分布 $p_{face}(\boldsymbol{x})$ 与 $p_{cat}(\boldsymbol{x})$ 高度不重叠。
这一观点在机器学习中被称为流形假设(Manifold Hypothesis):
自然数据(如图像、语音、文本)虽然表示在高维观测空间中,但其本质结构存在于一个低维、非线性的潜在流形上。
该假设是现代生成模型(如 GAN、VAE、扩散模型)得以成功的关键理论基础——它们的目标正是学习并逼近这个隐藏的低维数据流形。
人脸图像在 $\mathbb{R}^{30000}$ 中的概率分布 $P$,概率密度函数为 $p(\boldsymbol{x})$,意思是:$p(\boldsymbol{x})$ 越大,表示在 $\boldsymbol{x}$ 附近的小邻域内出现真实人脸图像的概率越高。若把 $30000$ 维压缩成 $2$ 维,使用 $x$ 轴和 $y$ 轴表示,概率密度 $p(x,y)$ 使用 $z$ 轴表示,那么人脸图像的概率密度函数就是一个曲面,其中绝大多数区域的 $z$ 趋近于 0,因为那些区域几乎不可能包含自然人脸图像。只有在对应于实际人脸图像存在的地方,$z$ 的值才会显著大于 0。
考虑离散场景,把 $\mathbb{R}^{30000}$ 想象成离散点,从中采样一个人脸图像,采到 $\boldsymbol{x}$ 的概率($\boldsymbol{x} \in \text{对应人脸图像的所有点}$)就是概率质量函数 $P(\boldsymbol{x})$。若把 $30000$ 维压缩成 $2$ 维,使用 $x$ 轴和 $y$ 轴表示,概率质量 $P(x,y)$ 使用 $z$ 轴表示,那么人脸图像的概率质量函数就是一个个点,其中绝大多数点的 $z$ 都为0,少部分点的 $z$ 大于 0 且 小于等于 1,对应真实/合理人脸图像(其实等于 1 也不可能,因为不可能只有 1 张人脸图像)。
基础知识 (2)
概率质量和概率密度 (2.1)
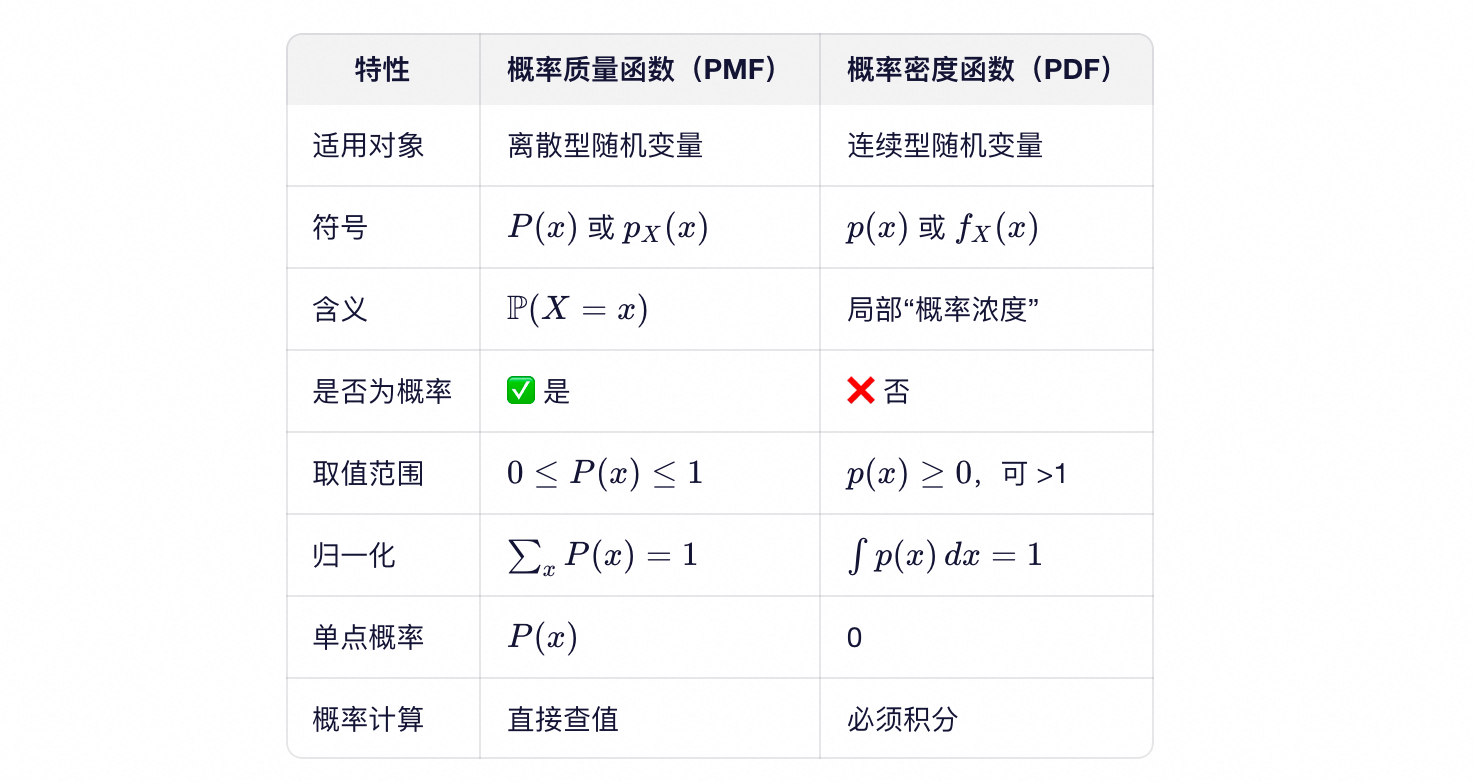
概率论中,用概率分布来描述随机变量的行为。根据随机变量是离散型还是连续型,使用两种不同的工具来刻画其分布:
- 离散型随机变量:概率质量函数(Probability Mass Function, PMF)
- 连续型随机变量:概率密度函数(Probability Density Function, PDF)
虽然名字相似,但它们的数学含义和使用方式有本质区别。
概率质量函数(PMF)——用于离散变量
设 $X$ 是一个离散型随机变量,其可能取值为可数集合 $\mathcal{X} \in {x_1, x_2, \dots}$。
概率质量函数(PMF)是一个函数 $P:\mathcal{X} \to [0,1]$,满足:
$$
P(x) = P(X = x), \quad \forall x \in \mathcal{X}
$$
且
$$
\sum_{x \in \mathcal{X}} P(x) = 1
$$
例子:掷骰子
- 随机变量 $X$:骰子点数 $\mathcal{X} \in {1, 2, 3, 4, 5, 6}$
- PMF:$P(x) = \frac{1}{6}$ 对所有 $x \in \mathcal{X}$
- 解读:$P(X=3) = P(3) = \frac{1}{6}$
直观比喻:“每个点的重量”
- 想象在一条数轴上放几个小砝码;
- 每个砝码的位置是 $x$,重量是 $P(x)$;
- 总重量为 1;
- $P(x)$ 就是“点 $x$ 上的概率质量” —— 这也是“质量函数”名称的由来。
关键性质:
- $P(x)$ 本身就是概率,所以 $0 \leq P(x) \leq 1$
- 可以直接说“$X$ 等于 $x$ 的概率是 $P(x)$”
概率密度函数(PMF)——用于连续变量
设 $X$ 是一个连续型随机变量,其取值在 $\mathbb{R}$(或 $\mathbb{R}^d$)上。
若存在一个非负可积函数 $p: \mathbb{R} \to [0, \infty)$,使得对任意区间 $[a,b]$ 有:
$$
P(a \leq X \leq b) = \int_a^b p(x) dx
$$
则称 $p(x)$ 为 $X$ 的概率密度函数(PDF)。
PDF 满足归一化条件:
$$
\int_{-\infty}^{\infty} p(x) dx = 1
$$
例子:标准正态分布
- PDF:$p(x) = \frac{1}{\sqrt{2\pi}} e^{-x^2/2}$
- 注意:$p(0) \approx 0.4$,但 $P(X = 0) = 0$
- 而 $P(-1 \leq X \leq 1) = \int_{-1}^{1} p(x) dx \approx 0.68$
直观比喻:“人口密度”
- 想象一个国家的人口分布:
- 人口密度(人/平方公里) ↔ 概率密度 $p(x)$
- 某城市的人口总数($\approx$ 人口密度 $\times$ 城市面积) ↔ 概率 $P(a \leq X \leq b)$
- 不能说“这个经纬度点上有 500 人”(点面积为 0),但可以说“每平方公里有 500 人”
关键性质:
- $p(x)$ 不是概率!它可以大于 1(例如均匀分布 $U(0,0.1)$ 的 PDF 是 10);
- 只有积分才有概率意义:$P(X \in A) = \int_A p(x) dx$;
- 单点概率恒为零:$P(X=x)=0$。
对比
误区
误区 1:“PDF 在 $x$ 处的值就是 $X=x$ 的概率。”
→ 错误!正确说法:
“PDF 在 $x$ 附近的积分才是概率。”
样本落到区间 $[a, b]$ 的概率,等于 PDF 在区间 $[a, b]$ 上的积分。
想象在 $x$ 附近放一个宽度为 $\Delta x$ 的小盒子,那么样本落入这个盒子的概率 $\approx p(x) \cdot \Delta x$。所以 $p(x)$ 越大,盒子越“拥挤”。
误区 2:“因为 p(x)≤1,所以 PDF 不会超过 1。”
→ 错误!反例:
均匀分布 $X \sim U(0, \varepsilon)$,PDF 为:
$$
p(x) = \begin{cases}
\frac{1}{\varepsilon}, & x \in [0, \varepsilon] \\
0, & \text{otherwise}
\end{cases}
$$
当 $\varepsilon = 0.01$ 时,$p(x) = 100$(在区间 $[0, 0.01]$ 内)。区间 $[0, 0.01]$ 内每个具体的点概率都为0(点没有长度),但 $[0, 0.01]$ 区间上的积分是1。
约定
本文约定
- 大写字母(如 $P$、$Q$)表示概率分布本身(抽象对象);
- 大写函数(如 $P(x)$、$Q(x)$)表示离散型变量的概率质量函数;
- 小写函数(如 $p(x)$、$q(x)$)表示连续型变量的概率密度函数;
为什么离散情形可以用同一个大写字母 $P$ 同时表示分布本身和质量函数,而连续情形必须区分 $P$(分布本身)和 $p(x)$(概率密度)?
离散情形:语义一致
- 概率分布 $P$ 完全由其在每个点上的概率值决定;
- 而这些概率值就是 $P(x) = P(X=x)$;
- 知道所有 $P(x)$ 就等于知道分布 $P$。
- 因此,用同一个符号 $P$ 表示“分布”和“其质量函数”不会引起歧义,反而体现了一种自然对应:“分布 $P$ 在 $x$ 处的取值就是 $P(x)$”。
- 所以:$P$(分布) ↔ $P(x)$(PMF) 是同一对象的两种视角。
连续情形:语义断裂
- 分布 $P$ 不能通过 $P(x) = P(X=x)$ 来描述,因为 $P(X=x) = 0$ (对所有 $x$ 成立);
- 必须引入一个辅助函数 $p(x)$(如前文);
- 这个 $p(x)$ 不是概率,而是密度;它甚至可能不唯一(在测度零集上可任意修改);
所以,关键区别是:
- 离散:分布 $=$ 点概率的集合 → 分布与 PMF 等价;
- 连续:分布 $\neq$ 密度函数 → 密度只是分布的一个表示工具(且非唯一)。
若仍用 $P(x)$ 表示密度,会强烈误导读者以为$P(x)$ 是概率,造成概念混淆。符号区分($P$ vs $p(x)$)是一种防错设计:提醒读者“此处不可直接解读为概率”。
KL 散度 (2.2)
KL 散度(Kullback-Leibler Divergence)是衡量两个概率分布差异的重要工具。它的核心思想源于信息论:
如果你以为数据服从分布 $Q$,但实际上它服从分布 $P$,那么当你用 $Q$ 来设计编码方案(如 Huffman 编码)时,平均会多花多少“信息量”?
这个额外的平均比特数(或纳特数),就是 $KL(P \mid\mid Q)$。
注意:KL 散度 不是距离,因为它:
- 不对称:$KL(P \mid\mid Q) \neq KL(Q \mid\mid P)$
- 不满足三角不等式:即存在分布 $P$, $Q$, $R$,使得 $KL(P \mid\mid R) \gt KL(P \mid\mid Q) + KL(Q \mid\mid R)$
因此,KL 散度被称为散度(divergence),而非度量(metric)。
离散情形
直观理解:“用错字典的代价”(结合Huffman编码理解)
- 假设有一本真实的英文小说,统计所有字母的出现频率,得到:$P(\text{‘e’}) = 0.12$,$P(\text{‘z’}) = 0.001$,……。这个 $P$ 就是“正确字典”。最优压缩(如 Huffman 编码)会为高频字母分配短码,低频字母分配长码;
- 但如果误用了一个错误的字母分布 $Q$(例如假设所有字母等概率,甚至认为 “z” 比 “e” 更常见),就会给 “e” 分配过长的码字,导致整体压缩效率下降。
KL 散度就是这种“编码效率损失”的平均值。
数学形式:设
- $P$ 为真实分布,其PMF 记为 $P(x) = P(X=x)$;类比:真实数据源中字母的真实频率;即从真实数据源中随机抽取一个字母,该字母恰好是 $x$ 的概率。
- $Q$ 为模型假设的分布,其 PMF 记为 $Q(x)$。
则 KL 散度定义为:
$$
KL(P \mid\mid Q) = \sum_{x} P(x) \log \frac{P(x)}{Q(x)}
$$
这里做一个直观分析(“惩罚”表示让 KL 变大;“收益”表示在 KL 上加一个负值,使它变小):
- 支撑缺失 → 无穷惩罚:若存在某个 $x$ 使得 $P(x) > 0$ 但 $Q(x) = 0$,则 $KL(P \mid\mid Q) = +\infty$。这意味着模型完全无法描述真实世界中可能出现的符号——编码失败!
- 完美匹配 → 零代价:当 $Q = P$ 时,$KL(P \mid\mid Q) = 0$,即使用真实分布编码,达到信息论最优。
- 低估高频 → 严重惩罚:当 $Q(x) \ll P(x)$(即低估了高频符号的概率),惩罚非常严重。因为 $\log \frac{P(x)}{Q(x)}$ 很大,且权重 $P(x)$ 也很大,乘积项成为一个显著的正数。
- 高估低频 → 收益很轻:
- 若 $x$ 是低频符号($P(x) \approx 0$),则尽管 $\log \frac{P(x)}{Q(x)} \to -\infty$,但加权后 $P(x) \log \frac{P(x)}{Q(x)} \to 0$;
- 即使 $P(x)$ 不太小(如 0.2 或 0.4),注意到 $P(x) < Q(x) \leq 1$,比值 $\frac{P(x)}{Q(x)}$ 不会极端小,因此 $\log \frac{P(x)}{Q(x)}$ 的绝对值有限,收益也有限。
- 更重要的是:概率分布必须满足 $\sum_x Q(x) = 1$。在一个符号上高估 $Q(x)$,必然导致其他符号的 $Q$ 值被压低。而那些被压低的符号中,往往包含真实高频符号($P$ 大),从而产生强烈的正惩罚项,足以抵消甚至远超此处的微弱收益。
- 正负项能抵消吗?例如,$P \neq Q$,但 KL 恰好为 0?不可能。只要 $P \neq Q$,就有 $KL(P \mid\mid Q) > 0$ —— 这是信息论的基本定理,称为 Gibbs 不等式。直观理解:
- 低估高频符号 → “重权 × 大正值” = 大惩罚;
- 高估低频符号 → “轻权 × 负值” = 小收益(即使对数绝对值大,乘以小权重后整体趋近于 0);
- 总和恒为正,无法抵消。
连续情形
量化编码的极限代价
在连续世界(如身高、像素亮度、语音波形),我们无法直接对实数做 Huffman 编码。但可以借助量化来逼近:
- 先把实数轴“分箱”(quantize):将连续值划分为许多小区间(例如宽度为 $\Delta$ 的 bin);
- 每个区间视为一个“符号”,其真实概率 $\approx p(x) \cdot \Delta$;
- 模型认为的概率 $\approx q(x) \cdot \Delta$;
- 若用模型 $q$ 设计最优编码,而真实分布是 $p$,则平均编码冗余(多花的比特数)为离散 KL 散度;
- 当 bin 越分越细($\Delta \to 0$),该冗余趋近于:
$$
KL(P \mid\mid Q) = \int_{-\infty}^{\infty} p(x) \log \frac{p(x)}{q(x)} dx
$$
这就是连续 KL 散度——它衡量的是:在无限精细的量化下,因误用密度模型 $q$ 而导致的平均信息损失。
JS 散度 (2.3)
Jensen-Shannon 散度(Jensen-Shannon Divergence, 简称 JS 散度)是一种衡量两个概率分布相似性的度量。
离散情形
设 $P$ 和 $Q$ 是定义在同一离散样本空间 $\mathcal{X}$ 上的两个概率分布,其概率质量函数(PMF)分别为 $P(x)$ 和 $Q(x)$,满足:
$$
\begin{aligned}
& P(x) \geq 0, \quad \forall x \in \mathcal{X} \\
& Q(x) \geq 0, \quad \forall x \in \mathcal{X} \\
& \sum_{x \in \mathcal{X}} P(x) = 1 \\
& \sum_{x \in \mathcal{X}} Q(x) = 1
\end{aligned}
$$
定义 $P$ 与 $Q$ 的等权混合分布 $M$ 为:
$$
M(x) = \frac{1}{2} P(x) + \frac{1}{2} Q(x), \quad \forall x \in \mathcal{X}
$$
概率解释:$M(x)$ 表示如下随机过程采到 $x$ 的概率:
- 以概率 $\frac{1}{2}$ 从分布 $P$ 中采样,
- 以概率 $\frac{1}{2}$ 从分布 $Q$ 中采样。
- 由全概率公式,该过程采到 $x$ 的总概率即为 $M(x)$。
在此基础上,Jensen-Shannon 散度(JS 散度)定义为:
$$
JS(P \mid\mid Q) = \frac{1}{2} KL(P \mid\mid M) + \frac{1}{2} KL(Q \mid\mid M)
$$
直观理解:
JS 散度衡量的是——两个分布 $P$ 和 $Q$ 分别相对于它们的“中间分布” M 的平均编码冗余。
换句话说:如果不知道数据来自 $P$ 还是 $Q$(各占一半可能),于是用混合模型 $M$ 来统一编码,那么:
- 当真实分布是 $P$ 时,平均多花 $KL(P \mid\mid M)$ 比特;
- 当真实分布是 $Q$ 时,平均多花 $KL(Q \mid\mid M)$ 比特;
- JS 散度就是这两种情况的平均额外代价。
JS 散度有以下性质:
- 对称性:$JS(P \mid\mid Q) = JS(Q \mid\mid P)$;KL 散度不满足。
- 零值条件:$JS(P \mid\mid Q) = 0 \iff P = Q$;KL 散度也满足此性质。
- 是否为距离:JS 散度本身不是距离,但 $\sqrt{JS(P \mid\mid Q)}$ 是一个度量(满足非负性、对称性、同一性与三角不等式);KL 散度不满足三角不等式。
- 有界性:$0 \leq JS(P \mid\mid Q) \leq \log 2$;具体上界取决于对数底数:
- 若使用自然对数,则上界为 $\ln 2 \approx 0.693$(单位:纳特);
- 若使用以 $2$ 为底的对数,则上界为 $1$(单位:比特);
容易验证:
- 当 $Q = P$ 时,混合分布 $M = \frac{1}{2} P + \frac{1}{2} Q = P = Q$,故
$$
JS(P \mid\mid Q) = \frac{1}{2} KL(P \mid\mid P) + \frac{1}{2} KL(Q \mid\mid Q) = 0
$$
- 当 $P$ 与 $Q$ 支撑集完全不相交时,例如在字符集 {a,b,c,d} 上,
$$
P = (0, 0, 0.5, 0.5), Q = (0.5, 0.5, 0, 0)
$$
则混合分布
$$
M = (0.25, 0.25, 0.25, 0.25)
$$
计算得:
$$
\begin{aligned}
& KL(P \mid\mid M) = \sum_x P(x) \log \frac{P(x)}{M(x)} = 0 + 0 + 0.5 \log \frac{0.5}{0.25} + 0.5 \log \frac{0.5}{0.25} = \log 2 \\
& KL(Q \mid\mid M) = \sum_x Q(x) \log \frac{Q(x)}{M(x)} = 0.5 \log \frac{0.5}{0.25} + 0.5 \log \frac{0.5}{0.25} + 0 + 0 = \log 2
\end{aligned}
$$
因此,
$$
JS(P \mid\mid Q) = \frac{1}{2} KL(P \mid\mid M) + \frac{1}{2} KL(Q \mid\mid M) = \log 2
$$
连续情形
设 $P$ 和 $Q$ 是定义在 $\mathbb{R}^d$(例如 $d=30000$ 对应人脸图像)上的两个连续概率分布,其概率密度函数(PDF)分别为 $p(x)$ 和 $q(x)$,满足:
$$
\begin{aligned}
& p(x) \geq 0, \quad \forall x \in \mathbb{R}^d \\
& q(x) \geq 0, \quad \forall x \in \mathbb{R}^d \\
& \int_{\mathbb{R}^d} p(x)dx = 1 \\
& \int_{\mathbb{R}^d} q(x)dx = 1
\end{aligned}
$$
定义它们的等权混合密度 $m(x)$ 为:
$$
m(x) = \frac{1}{2}p(x) + \frac{1}{2}q(x), \quad \forall x \in \mathbb{R}^d
$$
概率解释:$m(x)$ 是如下随机过程的密度:
- 以概率 $\frac{1}{2}$ 从分布 $P$ 中采样,
- 以概率 $\frac{1}{2}$ 从分布 $Q$ 中采样。
Jensen-Shannon 散度在连续情形下定义为:
$$
JS(P \mid\mid Q) = \frac{1}{2} KL(P \mid\mid M) + \frac{1}{2} KL(Q \mid\mid M)
$$
其中 KL 散度采用积分形式,故
$$
JS(P \mid\mid Q) = \frac{1}{2} \int_{\mathbb{R}^d} p(x) \log \frac{p(x)}{m(x)} dx + \frac{1}{2} \int_{\mathbb{R}^d} q(x) \log \frac{q(x)}{m(x)} dx
$$
直观理解:与离散情形完全相同——JS 散度衡量的是:若用混合模型 $M$ 统一编码来自 $P$ 或 $Q$ 的数据(各占一半可能),所付出的平均额外比特数。
- 若 $p(x)$ 高而 $m(x)$ 低(如 $P$ 与 $Q$ 分离),则 $KL(P \mid\mid M)$ 大,JS大。
- 若两分布重叠良好,则 $m(x)$ 接近 $p(x)$ 和 $q(x)$,KL 项小,JS 也小。
JS 散度在连续情形下保持所有关键性质:
- 对称性:$JS(P \mid\mid Q) = JS(Q \mid\mid P)$;KL 散度不满足。
- 零值条件:$JS(P \mid\mid Q) = 0 \iff p(x) = q(x)$;KL 散度也满足此性质。
- 有界性:$0 \leq JS(P \mid\mid Q) \leq \log 2$;
- 当 $supp(p) \cap supp(q) = \emptyset$(如人脸 vs 猫图像分布在不相交流形上),则 $JS(P \mid\mid Q) = log2$
“人脸分布 $P$ 与猫分布 $Q$ 的支撑集不相交” 意味着:
在 $\mathbb{R}^{30000}$ 中,不存在任何一个区域(无论多小),既可能包含真实人脸图像,又可能包含真实猫图像。
换句话说:人脸和猫的图像“活”在完全分离的两个子区域里,彼此不重叠。
用概率说法:$p(x)$ 大,表示 $x$ 附近邻域内,采集到人脸图像的可能性大;$q(x)$ 大,表示 $x$ 附近邻域内,采集到猫图像的可能性大;它们的支撑集不相交,是指它们对应的点,在 $\mathbb{R}^{30000}$ 空间上,区域没有重叠。
原始 GAN (3)
目标 (3.1)
假设有一堆真实人脸图像(训练集),希望构建一个模型,能生成新的、逼真的、从未见过的人脸。
这属于无监督生成建模(unsupervised generative modeling):
- 输入:只有样本 $\boldsymbol{x}_1, \boldsymbol{x}_2, \dots, \boldsymbol{x}_N \sim P_{\text{data}}$;
- 目标:学习一个模型 $P_{\text{model}}$,使得它能生成类似 $P_{\text{data}}$ 的新样本;
传统方法 (3.2)
在 GAN 之前,主流方法(如 VAE、PixelRNN、PixelCNN、Flow 模型等)大多基于显式密度建模:
- 定义一个带参数 $\boldsymbol{\theta}$ 的概率模型 $p_{\boldsymbol{\theta}}(\boldsymbol{x})$;
- 用最大似然优化:
$$
\max_{\boldsymbol{\theta}} \sum_{i=1}^{N} \log p_{\boldsymbol{\theta}}(\boldsymbol{x}_i)
$$
生成:运行一个随机过程,输出一个向量 $\boldsymbol{x} \in \mathbb{R}^{30000}$,使得 $\boldsymbol{x}$ 符合概率密度 $p_{\boldsymbol{\theta}}(\boldsymbol{x})$。具体意思是:
- 若 $p_{\boldsymbol{\theta}}(\hat{\boldsymbol{x}})$ 值较大(向量 $\hat{\boldsymbol{x}}$ 是典型的人脸图像),则生成的 $\boldsymbol{x}$ 在 $\hat{\boldsymbol{x}}$ 的固定 $\epsilon$-邻域内的概率较高;
- 若 $p_{\boldsymbol{\theta}}(\hat{\boldsymbol{x}})$ 值极小(向量 $\hat{\boldsymbol{x}}$ 是猫图像、天空图像、卡通人脸图像,或根本不是人类认为的图像——极大可能),则生成的 $\boldsymbol{x}$ 几乎不可能出现在 $\hat{\boldsymbol{x}}$ 附近(尽管概率密度理论上不为零);
- 因此,采样时几乎总是得到像人脸的图像,极少(理论上可能但实践中几乎不会)采到猫或噪声。
随机过程如何保证输出符合 $p_{\boldsymbol{\theta}}(\boldsymbol{x})$ 呢?取决于模型的结构:
- 自回归模型(PixelRNN / PixelCNN):从左到右、从上到下逐像素生成,每一步都从条件概率分布中采样:$x_1 \sim p_{\boldsymbol{\theta}}(x_1), \quad x_2 \sim p_{\boldsymbol{\theta}}(x_2 \mid x_1), \quad x_3 \sim p_{\boldsymbol{\theta}}(x_3 \mid x_1, x_2), \quad \dots$ 保证方式:根据链式法则,显式建模所有条件概率,并从中采样。
- 标准化流(Normalizing Flow):从一个简单先验分布(如标准高斯分布)采样 $\boldsymbol{z}$;通过一个可逆神经网络 $f_{\boldsymbol{\theta}}$ 映射到图像空间:$\boldsymbol{x} = f_{\boldsymbol{\theta}}(\boldsymbol{z})$。保证方式:构造一个可逆且光滑的变换,利用变量替换公式,使采样过程与密度定义严格一致。
GAN (3.3)
与传统方法不同,生成对抗网络(GAN) 由 Goodfellow 等人于 2014 年提出,其核心思想是放弃显式建模概率密度 $p_{\boldsymbol{\theta}}(\boldsymbol{x})$,转而通过一个隐式生成过程来学习数据分布。
核心动机
显式密度模型(如 VAE、Flow)要求能计算或近似 $\log p_{\boldsymbol{\theta}}(\boldsymbol{x})$,这在高维复杂数据(如高清人脸)上往往难以实现。
- 建模挑战:本质在于真实分布 $P_{\text{data}}$ 是未知的,不知道其密度函数 $p_{\text{data}}$ 的解析形式。分布 $P_{\text{data}}$ 的支撑集(即所有可能的人脸图像)嵌入在极高维空间(如 $\mathbb{R}^{30000}$ )中的一个低维非线性流形上。由于维度灾难,即使拥有大量观测样本,我们也无法通过经验分布可靠地推断该流形的全局结构或密度函数。
直观解释:支撑集太小(在整个 $\mathbb{R}^{30000}$ 空间中,所有合理的人脸图像所占据的区域体积占比几乎为零)。
低维类比:想象你在 $\mathbb{R}^{3}$(三维空间)中画一条光滑曲线(比如螺旋线),这条曲线是一维的(只需要一个参数 $t$ 就能描述),它“嵌入”在三维空间中;但它的三维体积(Lebesgue 测度)是 0 —— 你无法用任何正体积的“小方块”去填满它;如果你随机在 $\mathbb{R}^{3}$ 中采点,几乎不可能恰好落在曲线上。
同样地,人脸图像流形 $\mathcal{M}_{\text{face}}$ 可能是 100 维的,但它在 $\mathbb{R}^{30000}$ 空间中的 30000 维体积为 0(1维曲线在2维平面中的面积为0,2维曲面在3维空间中的体积为0,以此类推);所以,从 $\mathbb{R}^{30000}$ 中均匀随机采样一个向量,几乎必然得到一堆无意义的噪声,而不是人脸。
对建模的挑战就是,无法通过直方图、核密度估计等传统方法可靠估计密度函数 $p_{\text{data}}$ 的解析形式。
- 计算挑战:即使模型形式已知,$\log p_{\boldsymbol{\theta}}(\boldsymbol{x})$ 可能涉及高维积分或配分函数,无法精确计算(如 VAE、EBM);
而 GAN 观察到:我们并不真正需要知道 $p_{\text{model}}$ 的具体值,只要能生成“看起来真实”的样本即可。于是,GAN 将生成问题转化为一个两人零和博弈(minimax game):
- 一个生成器(Generator):试图伪造逼真图像;
- 一个判别器(Discriminator):试图分辨真假图像;
模型结构
GAN 由两个神经网络组成:
生成器 $G_{\boldsymbol{\theta}}$
- 输入:低维随机噪声 $\boldsymbol{z} \sim p_z(z)$($p_z(z)$ 通常为高斯分布、均匀分布等;$\boldsymbol{z}$ 是一个低维向量,维度远低于30000);
- 输出:一张合成图像 $\boldsymbol{x}_{\text{fake}} = G_{\boldsymbol{\theta}}(z) \in \mathbb{R}^{30000}$;
- 目标:让生成的图像尽可能“欺骗”判别器;
判别器 $D_{\boldsymbol{\phi}}$
- 输入:一张图像 $\boldsymbol{x}$ (可能来自真实数据或生成器);
- 输出:一个标量 $D_{\boldsymbol{\phi}}(\boldsymbol{x}) \in [0,1]$,表示该图像是“真实”的概率;
- 目标:最大化对真实图像输出高值、对伪造图像输出低值的能力;
对抗训练目标
原始 GAN 的优化目标是一个极小极大(minimax)问题:
$$
\min_{\theta} \max_{\phi} \mathbb{E}_{\boldsymbol{x} \sim p_{\text{data}}}[\log D_{\phi}(\boldsymbol{x})] + \mathbb{E}_{\boldsymbol{z} \sim p_{z}}[\log(1 - D_{\phi}(G_{\theta}(\boldsymbol{z})))]
$$
- 内层 $\max_{\phi}$:固定生成器,训练判别器以最好地区分真假;
- 外层 $\min_{\theta}$:固定判别器,训练生成器以最大化”被判别器误认为真实”的概率。
直观理解:判别器是“警察”,生成器是“造假者”。警察越厉害,造假者就被迫越逼真;造假者越逼真,警察也必须更敏锐——二者共同进化。
其中 $\mathbb{E}$ 是期望算子(expectation operator),用于计算数学期望值(就是“加权平均”)。
对于离散随机变量($P(\boldsymbol{x})$ 表示概率质量函数;$f(\boldsymbol{x})$ 是一个实值函数,表示 $\boldsymbol{x}$ 的“得分”):
$$
\mathbb{E}[f(\boldsymbol{x})] = \sum_{\boldsymbol{x}} f(\boldsymbol{x})P(\boldsymbol{x})
$$
对于连续随机变量($p(\boldsymbol{x})$ 表示概率密度函数;$f(\boldsymbol{x})$ 是一个实值函数,表示 $\boldsymbol{x}$ 的“得分”):
$$
\mathbb{E}[f(\boldsymbol{x})] = \int f(\boldsymbol{x}) p(\boldsymbol{x}) d\boldsymbol{x}
$$
在 GAN 中,
$$
\mathbb{E}_{\boldsymbol{x} \sim p_{\text{data}}}[\log D_{\phi}(\boldsymbol{x})]
$$
拆开细看:
- $\boldsymbol{x} \sim p_{\text{data}}$:表示 $\boldsymbol{x}$ 是一张真实的训练图像(比如来自你收集的人脸数据集)。
- $D_{\phi}(\boldsymbol{x})$:表示判别器(一个神经网络)看到这张图后,输出一个 0 到 1 之间的数,表示“我觉得这是真图的概率”。
- 如果输出接近 1:判别器认为很真实;
- 如果输出接近 0:判别器觉得是假的。
- $\log D_{\phi}(\boldsymbol{x})$:对这个“真实度”取对数。
- 当 $D_{\phi}(\boldsymbol{x})$ 接近 1 时,$\log D_{\phi}(\boldsymbol{x})$ 接近 0(很好!)
- 当 $D_{\phi}(\boldsymbol{x})$ 接近 0 时,$\log D_{\phi}(\boldsymbol{x})$ 会变成一个很大的负数(很不好!)
- 式子整体:在所有真实图像上,把这个 $\log D_{\phi}(\boldsymbol{x})$ 的值平均一下,得到一个小于等于零的数,实际是期望值,可以理解为大量真实图片上的平均表现。
所以,这个式子(小于等于零)表示:在所有真实人脸图像上,看看判别器 $D_{\phi}$ 给它们打的“真实度分数”有多高,然后取一个平均,更准确地说,是加权平均;或者说是,判别器 $D_{\phi}$ 给真实人脸图像打的期望分数。 这个值越高(越接近 0),判别器 $D_{\phi}$ 越优秀。
再来看,
$$
\mathbb{E}_{\boldsymbol{z} \sim p_{z}}[\log(1 - D_{\phi}(G_{\theta}(\boldsymbol{z})))]
$$
拆开细看:
- $\boldsymbol{z} \sim p_{z}$:从一个简单的随机分布(比如标准正态分布)中采样一个噪声向量 z。可以把它想象成“生成器的灵感种子”。
- $G_{\theta}(\boldsymbol{z})$:把这个噪声输入生成器 $G$,它输出的一张合成的假人脸图像(比如 $100 \times 100$ 的 RGB 图)。
- $D_{\phi}(G_{\theta}(\boldsymbol{z}))$:把这张假图送给判别器 $D_{\phi}$,它会给出一个 0 到 1 之间的分数,表示:“我觉得这张图是真的概率”。如果判别器很聪明,它会给假图打很低的分,比如 0.1、0.05。判别器越聪明,这个值越小。
- $1 - D_{\phi}(G_{\theta}(\boldsymbol{z}))$:判别器“觉得这张图是假的概率”。判别器越聪明,这个值越大。
- $\log(1 - D_{\phi}(G_{\theta}(\boldsymbol{z})))$:对“假的概率”取对数。得到一个小于等于零的数。
- 如果判别器非常确信是假的,例如 $D = 0.05$,$\log(1 - 0.05) \approx -0.051$(接近 0,很好!)
- 如果判别器被骗了(比如 D=0.8,即认为很真),则 $\log(0.2) \approx -1.6$(很负,很不好!)
- 式子整体:在大量不同的噪声 z 上重复这个过程,把所有 $\log(1 - D_{\phi}(G_{\theta}(\boldsymbol{z})))$ 的值平均一下,也是一个小于等于零的数。
一句话总结:在所有生成的假图像上,看看判别器有多“坚定地认为它们是假的”,然后取一个平均。这个值越高(越接近 0),也表示判别器 $D_{\phi}$ 越优秀。判别器希望自己能准确识别出生成器造的假图——它希望假图被判为“假”的概率越高越好。
生成过程
一旦训练完成,生成新样本只需两步:
- 从先验分布采样噪声 $\boldsymbol{z} \sim p_{z}(\boldsymbol{z})$;
- 计算 $\boldsymbol{x}_{\text{new}} = G_{\theta}(\boldsymbol{z})$;
原始 GAN 的理论极限与缺陷 (3.4)
在原始 GAN 论文(Goodfellow et al., 2014)中,一个关键结论是:
如果判别器 $D$ 被训练到最优(即对任意固定的生成器 $G$,$D$ 都达到其最优解),那么生成器的优化目标等价于最小化真实分布 $P_{\text{data}}$ 与生成分布 $P_g$ 之间的 Jensen-Shannon 散度(JS 散度)。
理论上,当 $P_g = P_{\text{data}}$ 时,JS 散度取得最小值 0,GAN 达到全局最优。然而,在高维连续空间(例如图像空间 $\mathbb{R}^{30000}$ )中,JS 散度存在严重的几何缺陷:
- 真实数据分布 $P_{\text{data}}$ 和生成分布 $P_g$ 通常都集中在低维非线性流形上;
- 由于维度极高,这两个流形几乎必然互不相交——即使生成的图像在视觉上与真实人脸高度相似;
- 当两个分布的支撑集(support)互不相交时,JS 散度恒等于其最大值:
$$
JS(P_{\text{data}} \mid\mid P_g) = \log 2
$$
- 此时,生成器接收到的梯度几乎为零,即发生梯度消失(vanishing gradient)。
这正是早期 GAN 训练不稳定、易出现模式崩溃(mode collapse)的根本原因:即使生成图像看起来很像人脸,只要其分布与真实分布无重叠,JS 散度仍为常数,无法提供优化方向(JS 散度就无法提供有效的优化信号)。
GAN 的“对抗”框架本身是通用的:生成器与判别器协同进化,原则上可以使用任意概率散度(divergence)来衡量 $P_{\text{data}}$ 与 $P_g$ 的差异。那么,是什么导致原始 GAN 最终对应 JS 散度?
根本原因在于其目标函数的具体形式(即使用 $\log D$ 和 $\log (1 - D)$):
$$
\mathbb{E}_{\boldsymbol{x} \sim p_{\text{data}}}[\log D_{\phi}(\boldsymbol{x})] + \mathbb{E}_{\boldsymbol{z} \sim p_{z}}[\log(1 - D_{\phi}(G_{\theta}(\boldsymbol{z})))]
$$
这一设计并非随意选取,而是直接源于二分类 logistic 回归的负对数似然(即交叉熵损失),即受到二分类对数似然(logistic regression)的启发。
具体而言(假设与推导):
- 判别器输出 $D(\boldsymbol{x}) \in (0,1)$(通常通过 sigmoid 激活),被解释为“样本 $\boldsymbol{x}$ 来自真实数据的概率”;
- 训练时通常以 1:1 的比例混合真实样本与生成样本,相当于假设两类先验概率相等($p(y=1) = p(y=0) = 0.5$);
- 在此设定下,最大化上述目标函数等价于用最大似然估计学习后验概率 $p(y=1 \mid \boldsymbol{x})$;
- 将最优判别器代入后,可严格推导出生成器最小化的是 JS 散度;
因此,JS 散度并非 GAN 框架的必然结果,而是由“交叉熵损失 + 概率输出 + 1:1 采样”这一具体实现所决定的。
Goodfellow 等人选择 $\log D$ 和 $\log (1 - D)$ 是因为:
- 它来自成熟的分类理论(logistic regression);
- 实现简单(sigmoid + cross-entropy);
- 理论上能收敛到 $P_g = P_{\text{data}}$
只是后来人们发现:在高维流形假设下,JS 散度的几何性质并不适合生成建模——即使分布非常接近,只要支撑集不重叠,散度就饱和,导致训练失效。
这一认识催生了后续一系列重要改进,如 WGAN(Wasserstein 距离)、LSGAN(最小二乘损失)、f-GAN(一般 f-divergence)等。
关键启示:要使用其他散度,必须改写目标函数。GAN 的强大之处在于其框架的灵活性,而其局限往往源于具体损失函数的选择。
WGAN (4)
原始 GAN 问题回顾 (4.1)
如前所述,原始 GAN 的目标函数($\log D$ 和 $\log (1 - D)$)隐含优化的是 Jensen-Shannon (JS) 散度。但在高维空间(如图像)中:
- 真实数据分布 $P_{\text{data}}$ 和生成分布 $P_g$ 都集中在低维流形上;
- 这两个流形几乎必然互不相交(即使视觉上很像);
- 此时 $JS(P_{\text{data}} \mid\mid P_g) = \log 2$ (常数);
- 导致 生成器梯度为零 → 无法学习(梯度消失);
- 同时,判别器很容易“过强”,把生成器彻底压制,导致模式崩溃(只生成少数几种样本)。
问题本质:JS 散度在分布无重叠时无法提供有意义的距离度量和梯度信号。
WGAN 的核心思想 (4.2)
WGAN 的核心思想是用 Wasserstein 距离替代 JS 散度。
WGAN 的关键洞见是:换一个更好的“距离”来衡量两个分布的差异——Wasserstein 距离(也称 Earth Mover’s Distance, EMD)。
所以,理解 WGAN 的关键在于理解 Wasserstein 距离。
Wasserstein 距离 (4.3)
离散情形
核心思想:搬运泥土的最小“工作量”。想象有两片土堆:
- $P$(代表真实分布):由若干土堆组成,每个土堆有位置和质量;
- $Q$(代表生成分布):同样由若干土堆组成,其位置和质量可能不同。
1-Wasserstein 距离 = 将第二片土堆重新摆放成第一片土堆所需做的最小“总功”。其中,$\text{功} = \text{搬运的土量} \times \text{搬运的距离}$。
这就是它又被称为 Earth Mover’s Distance (EMD) —— “搬土工距离”。
那么,这里的“位置”和“质量”在数学上对应什么?
- 位置:即样本空间中的一个点,通常记为 $\boldsymbol{x} \in \mathcal{X}$。它代表随机变量的一个可能取值,在机器学习中通常是一个特征向量。例如,在图像生成任务中,一张 $100 \times 100 \times 3$ 的图像可视为 $\mathbb{R}^{30000}$ 中的一个点,这就是一个“位置”。
- 质量:在离散情形下,表示该位置处的概率质量(probability mass),即该样本在分布中所占的权重。
所有土堆的质量之和为 1,符合概率分布的归一化要求。因此,“一片土堆(若干土堆)”就完整地定义了一个离散概率分布:每个土堆对应一个原子(atom),其位置是支撑点,质量是该点的概率。
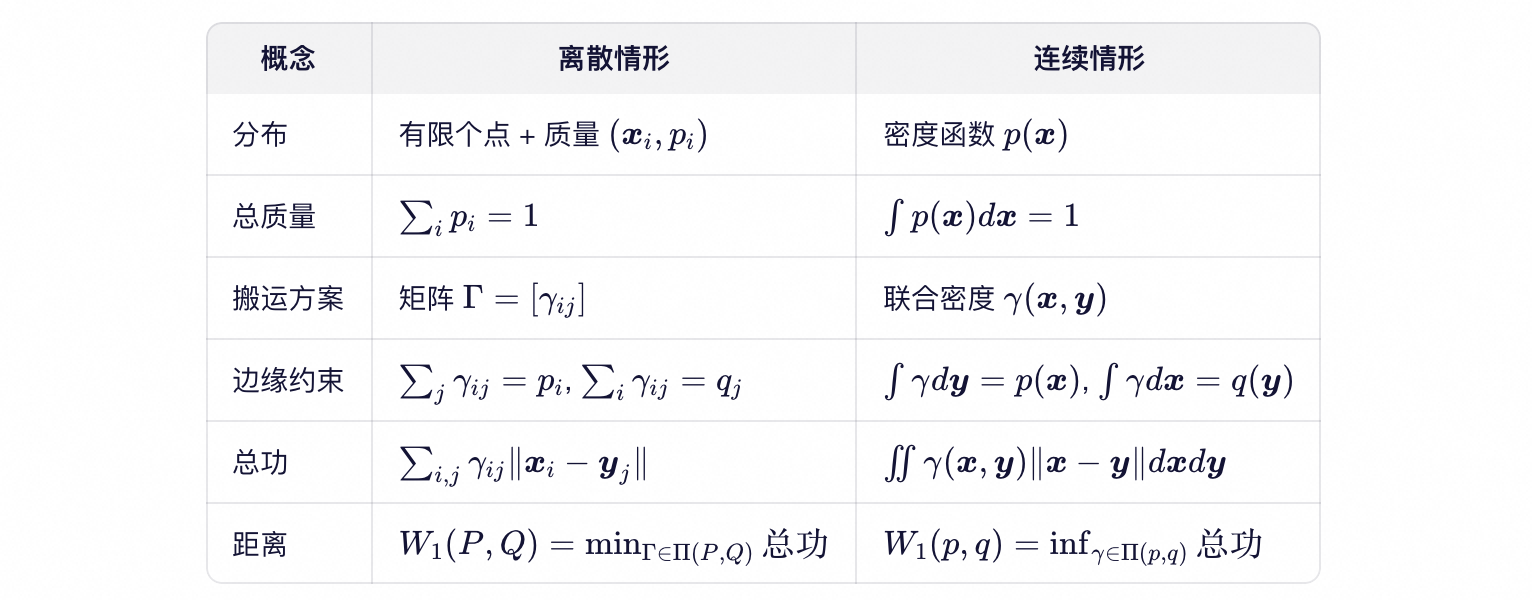
假如真实分布 $P$ (即 $P_{\text{data}}$)定义在 $n$ 个点上,生成分布 $Q$ (即 $P_g$)定义在 $m$ 个点上。一个搬运方案可以表示成一个 $n \times m$ 的矩阵 $\Gamma = [\gamma_{ij}]$,满足:
- 非负性:$\gamma_{ij} \geq 0$(不能搬负质量);
- 行和约束:$\sum_{j=1}^m \gamma_{ij} = p_i$ (第 i 个目标点收到的总质量 = 它应有的质量);
- 列和约束:$\sum_{i=1}^n \gamma_{ij} = q_j$ (第 j 个源点发出的总质量 = 它原有的质量);
所有满足上述条件的 $\Gamma$ 构成的集合记为:$\Pi(P,Q)$,其中 $p = (p_1, p_2, \dots, p_n)$,$q = (q_1, q_2, \dots, q_m)$。
在二维空间中举个例子。
真实分布 $P$ 定义在 $n = 3$ 个点上:
| 点 | 位置 $\boldsymbol{x} \in \mathbb{R}^{2}$ | 质量 $p_i$ |
|---|---|---|
| $\boldsymbol{x}_1$ | $(0,0)$ | $0.2$ |
| $\boldsymbol{x}_2$ | $(2,2)$ | $0.5$ |
| $\boldsymbol{x}_3$ | $(4,1)$ | $0.3$ |
总质量:$0.2 + 0.5 + 0.3 = 1$
生成分布 $Q$ 定义在 $m = 4$ 个点上:
| 点 | 位置 $\boldsymbol{y} \in \mathbb{R}^{2}$ | 质量 $q_j$ |
|---|---|---|
| $\boldsymbol{y}_1$ | $(0.5,0.5)$ | $0.1$ |
| $\boldsymbol{y}_2$ | $(1,1)$ | $0.3$ |
| $\boldsymbol{y}_3$ | $(3,2)$ | $0.4$ |
| $\boldsymbol{y}_4$ | $(5,0)$ | $0.2$ |
总质量:$0.1 + 0.3 + 0.4 + 0.2 = 1$
欧氏距离:
| $C_{i,j}$ | $\boldsymbol{y}_1 = (0.5,0.5)$ | $\boldsymbol{y}_2 = (1,1)$ | $\boldsymbol{y}_3 = (3,2)$ | $\boldsymbol{y}_4 = (5,0)$ |
|---|---|---|---|---|
| $\boldsymbol{x}_1 = (0,0)$ | $\sqrt {0.5^2+0.5^2} = 0.7071$ | $\sqrt {1^2+1^2} = 1.4142$ | $\sqrt {3^2+2^2} = 3.6056$ | $\sqrt {5^2+0^2} = 5.0000$ |
| $\boldsymbol{x}_2 = (2,2)$ | $\sqrt {1.5^2+1.5^2} = 2.1213$ | $\sqrt {1^2+1^2} = 1.4142$ | $\sqrt {1^2+0^2} = 1.0000$ | $\sqrt {3^2+2^2} = 3.6056$ |
| $\boldsymbol{x}_3 = (4,1)$ | $\sqrt {3.5^2+0.5^2} = 3.5355$ | $\sqrt {3^2+0^2} = 3.0000$ | $\sqrt {1^2+1^2} = 1.4142$ | $\sqrt {1^2+1^2} = 1.4142$ |
搬运方案1:就近高效分配
$$
\Gamma^1 = \begin{bmatrix}
\gamma_{11} & \gamma_{12} & \gamma_{13} & \gamma_{14} \\
\gamma_{21} & \gamma_{22} & \gamma_{23} & \gamma_{24} \\
\gamma_{31} & \gamma_{32} & \gamma_{33} & \gamma_{34}
\end{bmatrix} = \begin{bmatrix}
0.1 & 0.1 & 0 & 0 \\
0 & 0.2 & 0.3 & 0 \\
0 & 0 & 0.1 & 0.2
\end{bmatrix}
$$
解释:一列代表一个 $\boldsymbol{y}$ 如何把它的质量分配给多个 $\boldsymbol{x}$;一行代表一个 $\boldsymbol{x}$ 如何从多个 $\boldsymbol{y}$ 接收质量。
- $\boldsymbol{y}_1$ 的质量 $0.1$ 全部给最近的 $\boldsymbol{x}_1$
- $\boldsymbol{y}_2$ 的质量 $0.3$,给 $\boldsymbol{x}_1$ : $0.1$,给 $\boldsymbol{x}_2$ : $0.2$
- $\boldsymbol{y}_3$ 的质量 $0.4$,给 $\boldsymbol{x}_2$ : $0.3$,给 $\boldsymbol{x}_3$ : $0.1$
- $\boldsymbol{y}_4$ 的质量 $0.2$,全部给最近的 $\boldsymbol{x}_3$
验证约束:
行和(目标接收)
- $\boldsymbol{x}_1$:$0.1 + 0.1 + 0 + 0 = 0.2 = p_1$
- $\boldsymbol{x}_2$:$0 + 0.2 + 0.3 + 0 = 0.5 = p_2$
- $\boldsymbol{x}_3$:$0 + 0 + 0.1 + 0.2 = 0.3 = p_3$
列和(源发出)
- $\boldsymbol{y}_1$:$0.1 + 0 + 0 = 0.1 = q_1$
- $\boldsymbol{y}_2$:$0.1 + 0.2 + 0 = 0.3 = q_2$
- $\boldsymbol{y}_3$:$0 + 0.3 + 0.1 = 0.4 = q_3$
- $\boldsymbol{y}_4$:$0 + 0 + 0.2 = 0.2 = q_4$
所以,$\Gamma^1 \in \Pi(P,Q)$。实际上,这是一个很高效的搬运方案,它的总工作量是:
$$
\text{Cost}^1 = \sum_{i=1}^3 \sum_{j=1}^4 \gamma_{ij} \cdot C_{ij}
$$
逐项计算:
- $i=1$:$0.1 \times 0.7071 + 0.1 \times 1.4142 + 0 \times 3.6056 + 0 \times 5.0000 = 0.21213$;(从4个 $\boldsymbol{y}$ 各搬运一部分,堆成 $\boldsymbol{x}_1$ 的工作量)
- $i=2$:$0 \times 2.1213 + 0.2 \times 1.4142 + 0.3 \times 1.0000 + 0 \times 3.6056 = 0.58284$;(从4个 $\boldsymbol{y}$ 各搬运一部分,堆成 $\boldsymbol{x}_2$ 的工作量)
- $i=3$:$0 \times 3.5355 + 0 \times 3.0000 + 0.1 \times 1.4142 + 0.2 \times 1.4142 = 0.42426$;(从4个 $\boldsymbol{y}$ 各搬运一部分,堆成 $\boldsymbol{x}_3$ 的工作量)
所以,总工作量是 $0.21213 + 0.58284 + 0.42426 = 1.21923$
搬运方案2:低效方案
$$
\Gamma^2 = \begin{bmatrix}
\gamma_{11} & \gamma_{12} & \gamma_{13} & \gamma_{14} \\
\gamma_{21} & \gamma_{22} & \gamma_{23} & \gamma_{24} \\
\gamma_{31} & \gamma_{32} & \gamma_{33} & \gamma_{34}
\end{bmatrix} = \begin{bmatrix}
0.05 & 0.15 & 0 & 0 \\
0.05 & 0.1 & 0.25 & 0.1 \\
0 & 0.05 & 0.15 & 0.1
\end{bmatrix}
$$
解释:
- $\boldsymbol{y}_1$ 的质量 $0.1$,给 $\boldsymbol{x}_1$ : $0.05$,给 $\boldsymbol{x}_2$ : $0.05$
- $\boldsymbol{y}_2$ 的质量 $0.3$,给 $\boldsymbol{x}_1$ : $0.15$,给 $\boldsymbol{x}_2$ : $0.1$,给 $\boldsymbol{x}_3$ : $0.05$
- $\boldsymbol{y}_3$ 的质量 $0.4$,给 $\boldsymbol{x}_2$ : $0.25$,给 $\boldsymbol{x}_3$ : $0.15$
- $\boldsymbol{y}_4$ 的质量 $0.2$,给 $\boldsymbol{x}_2$ : $0.1$,给 $\boldsymbol{x}_3$ : $0.1$
注意:$\boldsymbol{y}_4 = (5,0)$ 向 $\boldsymbol{x}_2 = (2,2)$ 搬运(欧氏距离 $\approx 3.6$),这比给 $\boldsymbol{x}_3 = (4,1)$ 更远,但数学上完全合法!
验证约束:
行和(目标接收)
- $\boldsymbol{x}_1$:$0.05 + 0.15 + 0 + 0 = 0.2 = p_1$
- $\boldsymbol{x}_2$:$0.05 + 0.1 + 0.25 + 0.1 = 0.5 = p_2$
- $\boldsymbol{x}_3$:$0 + 0.05 + 0.15 + 0.1 = 0.3 = p_3$
列和(源发出)
- $\boldsymbol{y}_1$:$0.05 + 0.05 + 0 = 0.1 = q_1$
- $\boldsymbol{y}_2$:$0.15 + 0.1 + 0.05 = 0.3 = q_2$
- $\boldsymbol{y}_3$:$0 + 0.25 + 0.15 = 0.4 = q_3$
- $\boldsymbol{y}_4$:$0 + 0.1 + 0.1 = 0.2 = q_4$
所以,$\Gamma^2 \in \Pi(P,Q)$。这是一个低效方案。它的总工作量是:
$$
\text{Cost}^2 = \sum_{i=1}^3 \sum_{j=1}^4 \gamma_{ij} \cdot C_{ij}
$$
逐项计算:
- $i=1$:$0.05 \times 0.7071 + 0.15 \times 1.4142 + 0 \times 3.6056 + 0 \times 5.0000 = 0.247485$;(从4个 $\boldsymbol{y}$ 各搬运一部分,堆成 $\boldsymbol{x}_1$ 的工作量)
- $i=2$:$0.05 \times 2.1213 + 0.1 \times 1.4142 + 0.25 \times 1.0000 + 0.1 \times 3.6056 = 0.858045$;(从4个 $\boldsymbol{y}$ 各搬运一部分,堆成 $\boldsymbol{x}_2$ 的工作量)
- $i=3$:$0 \times 3.5355 + 0.05 \times 3.0000 + 0.15 \times 1.4142 + 0.1 \times 1.4142 = 0.50355$;(从4个 $\boldsymbol{y}$ 各搬运一部分,堆成 $\boldsymbol{x}_3$ 的工作量)
所以,总工作量是 $0.247485 + 0.858045 + 0.50355 = 1.60908$
可见,$\Gamma^1$ 和 $\Gamma^2$ 都是合法的搬运方案,这样的搬运方案有无穷多种,它们构成的集合是 $\Pi(P,Q)$,每种方案对应一个工作量,而1-Wasserstein 距离是其中最小工作量 ,记作:
$$
W_1(P,Q) = \min_{\Gamma \in \Pi(P,Q)} \sum_{i=1}^n \sum_{j=1}^m \gamma_{ij} \mid\mid \boldsymbol{x}_i - \boldsymbol{y}_j \mid\mid
$$
其中,
- Wasserstein 距离有一个阶数的概念,这里使用1阶,故记作 $W_1(P,Q)$
- $\mid\mid \boldsymbol{x}_i - \boldsymbol{y}_j \mid\mid$:从 $\boldsymbol{y}_j$ 到 $\boldsymbol{x}_i$ 搬运距离(通常用欧氏距离)
连续情形
离散 Wasserstein 距离可以看成将第一片土堆重新摆放成另一片土堆所需做的最小“总功”;连续情形其实就是这个想法的自然推广——只是把“一片土堆(一堆一堆的土)”变成“一整片连续分布的泥土”。
一句话总结:连续 Wasserstein 距离 = 把一片泥浆 $q$ 重新塑形为另一片泥浆 $p$ 所需的最小总功。
在连续情形中:
- 分布是连续的概率密度函数:$p(\boldsymbol{x})$
- 可以想象整个平面上铺着一层厚度不均的泥土,$p(\boldsymbol{x})$ 表示在位置 $\boldsymbol{x}$ 处的“泥土密度”
- 总泥量仍为 1:$\int p(\boldsymbol{x}) d\boldsymbol{x} = 1$
搬运方案
- 离散时:用矩阵 $\gamma_{ij}$ 表示从 $\boldsymbol{y}_j$ 搬多少质量到 $\boldsymbol{x}_i$
- 连续时:用一个$\boldsymbol{x}$ 和 $\boldsymbol{y}$ 的联合概率密度函数 $\gamma(\boldsymbol{x},\boldsymbol{y})$ 表示“从位置 $\boldsymbol{y}$ 搬到位置 $\boldsymbol{x}$ 的单位质量流”
也必须满足:
- 非负性:$\gamma(\boldsymbol{x},\boldsymbol{y}) \geq 0$(不能搬负质量);
- 约束1(对应离散情形的行和约束):$\int \gamma(\boldsymbol{x},\boldsymbol{y}) d\boldsymbol{y} = p(\boldsymbol{x})$;
- 约束2(对应离散情形的列和约束):$\int \gamma(\boldsymbol{x},\boldsymbol{y}) d\boldsymbol{x} = q(\boldsymbol{y})$;
所有满足上述条件的联合概率密度函数 $\gamma$ 构成集合 $\Pi(p,q)$ —— 这是 $\Pi(P,Q)$ 的连续版本。
1-Wasserstein 距离(连续)
和离散一样,总工作量是“搬运量 $\times$ 距离”的积分:
$$
W_1(p,q) = \inf_{\gamma \in \Pi(p,q)} \int \int \mid\mid \boldsymbol{x} - \boldsymbol{y} \mid\mid \gamma(\boldsymbol{x},\boldsymbol{y}) d\boldsymbol{x} d\boldsymbol{y}
$$
其中,
- $\inf$:表示infimum(下确界),因为可能没有最小值,只有下确界
- $\mid\mid \boldsymbol{x} - \boldsymbol{y} \mid\mid$:搬运距离(通常用欧氏距离)
- $\gamma(\boldsymbol{x},\boldsymbol{y}) d\boldsymbol{x} d\boldsymbol{y}$ :从 $\boldsymbol{y}$ 附近搬到 $\boldsymbol{x}$ 附近的微小质量
对比
与离散情形对比:
- 连续情形 = 离散情形的极限:当土堆越来越多、越来越密,就变成了连续泥滩;
- 核心思想不变:最小化“质量 $\times$ 距离”的总搬运成本;
- 数学工具升级:求和 → 积分,矩阵 → 联合密度函数;
- 直觉完全通用:已经会“搬土”,现在只是在搬“泥浆”;
因此,只要理解了离散的 EMD,就已经掌握了 Wasserstein 距离的灵魂。
WGAN 实践层面 (4.4)
理论
- 真实分布 $P_{\text{data}}$ :定义在整个图像空间($\mathbb{R}^{30000}$)上的连续概率分布;
- 生成分布 $P_g$:由生成器 $G$ 和先验噪声 $\boldsymbol{z} \sim p_{\boldsymbol{z}}$ 诱导出的分布,通常也没有解析密度函数;
所以,$W_1(P_{\text{data}},P_{g})$ 这个理论量无法直接计算。
实践
- 我们只有:
- 从 $P_{\text{data}}$ 采样得到的真实数据 $\boldsymbol{x}_1, \boldsymbol{x}_2, \dots$ (例如 100 万张真人脸图像)
- 从 $P_g$ 采样得到的生成数据 $\boldsymbol{y}_1, \boldsymbol{y}_2, \dots$ (例如 $G$ 生成的 200 万张假人脸图像)
- 于是,我们用经验分布(empirical distribution) 来近似真实分布和生成分布:
- $\hat{P}_{\text{data}}$:100万张真人脸图像,每张的概率质量是 $\frac{1}{1 \times 10^6}$
- $\hat{P}_g$:200万张假人脸图像,每张的概率质量是 $\frac{1}{2 \times 10^6}$
- 这就回到了离散情形(忘掉 $P_{\text{data}}$ 和 $P_g$ ,注意力转向 $\hat{P}_{\text{data}}$ 和 $\hat{P}_g$,这是两个具体的、离散的分布)
- $\Pi(\hat{P}_{\text{data}},\hat{P}_g)$ 是 $(1 \times 10^6) \times (2 \times 10^6)$ 的运输矩阵的集合;
- $W_1(\hat{P}_{\text{data}},\hat{P}_g)$ 就是经典的 Earth Mover’s Distance (EMD)
也就是说,实际训练中,我们用有限样本构造经验分布 $\hat{P}_{\text{data}}$ 和 $\hat{P}_g$;虽然无法计算真实的 $W_1(P_{\text{data}}, P_g)$ ,但 $W_1(\hat{P}_{\text{data}}, \hat{P}_g)$ 提供了一个可优化且梯度稳定的训练目标。
使用 KR 对偶避免直接计算 EMD
虽然我们的目标已转向 $\hat{P}_{\text{data}}$ 和 $\hat{P}_g$ 这两个具体的、离散的分布,理论上可以精确计算 EMD,但计算精确 EMD 的复杂度是 $O(n^3 \log n)$,不可扩展。
因此 Wasserstein GAN (WGAN) 使用了KR 对偶公式(Kantorovich-Rubinstein 对偶公式):
- 请来一位地形测量员,他可以给空间中每个点 $\boldsymbol{x}$ 赋予一个“高度” $f(\boldsymbol{x})$;但有个限制,地形不能太陡峭——任意两点的高度差不能超过它们之间的距离,即 $\text{坡度} \leq 1$,这叫做1-Lipschitz 条件:
$$
|f(\boldsymbol{x}) - f(\boldsymbol{y})| \leq \mid\mid \boldsymbol{x} - \boldsymbol{y} \mid\mid
$$
- 注意是空间中任意两个点都必须满足 1-Lipschitz 条件,不管它来自 $\hat{P}_{\text{data}}$ 还是 $\hat{P}_g$,亦或根本不来自 $\hat{P}_{\text{data}}$ 或 $\hat{P}_g$;换句话说,这个约束是全局的,适用于整个空间 $\mathbb{R}^{30000}$;
- 在此限制下,他可以给 $\mathbb{R}^{30000}$ 每个点一个高度;因此,$\hat{P}_{\text{data}}$ (100 万个点)被塑造成一片地形;$\hat{P}_g$ (200 万个点)被塑造成另一片地形;
- 这两个地形的平均高度分别记作 $\mathbb{E}_{\text{data}}[f]$ 和 $\mathbb{E}_g[f]$ ;其中 $\mathbb{E}$ 是期望算子,也就是加权平均——对所有点加权平均 $f$ 的值;
两者之差(平均高度差)是 $\mathbb{E}_{\text{data}}[f] - \mathbb{E}_g[f]$;
直觉:把 $\mathbb{R}^{30000}$ 想象成二维平面,加上高度,构成三维立体空间。
- 如果两片点云($\hat{P}_{\text{data}}$ 和 $\hat{P}_g$)离得很远,$f$ 在 1-Lipschitz 条件的限制之下,也可以让两片点云之间形成很大落差,因为距离远就允许高度差大,即它们的平均高度差 $\mathbb{E}_{\text{data}}[f] - \mathbb{E}_g[f]$ 可以很大。换句话说,1-Lipschitz 允许两点间高度差最多等于它们的距离;如果两片点云整体分离很远(例如一个是另一个的平移,平移向量长度为 $D$),那么存在合法的 $f$(如沿分离方向的线性函数),使得平均高度差达到 $D$,即 $\mathbb{E}_{\text{data}}[f] - \mathbb{E}_g[f] = D$;
- 相反,如果两片点云离得很近,在 1-Lipschitz 条件的限制之下,无论 $f$ 如何选择,两片点云之间的落差都不会太大,因为距离近不允许高度差大,即它们的平均高度差 $\mathbb{E}_{\text{data}}[f] - \mathbb{E}_g[f]$ 很小;
这就是 KR 对偶公式的惊人结论:1-Wasserstein 距离 $=$ 所有合法地形中最大的平均高度差,数学表达就是:
$$
W_1(\hat{P}_{\text{data}}, \hat{P}_g) = \sup_{||f||_L \leq 1} \left( \mathbb{E}_{\text{data}}[f] - \mathbb{E}_g[f] \right)
$$
其中,
- $\sup$ 表示supremum(上确界);
- $||f||_L = \sup_{\boldsymbol{x} \neq \boldsymbol{y}} \frac{|f(\boldsymbol{x}) - f(\boldsymbol{y})|}{||\boldsymbol{x} - \boldsymbol{y}||}$;
- $||f||_L \leq 1$ 表示 $f$ 满足 1-Lipschitz 条件;
注意,平均高度差 $\mathbb{E}_{\text{data}}[f] - \mathbb{E}_g[f]$ 没有加绝对值,所以它本身可正可负。但$W_1(\hat{P}_{\text{data}}, \hat{P}_g)$ 是对称的,可以选择 $f^\prime(\boldsymbol{x}) = -f(\boldsymbol{x})$ 调换正负(若 $f(\boldsymbol{x})$ 满足 1-Lipschitz 条件,则 $f^\prime(\boldsymbol{x})$ 也满足);$\sup$(即上确界)会自动取到最大正值。
判别器——众里寻他千百度
使用 KR 对偶公式之后,问题转化为:寻找一个函数 $f$,并通过样本估计两个期望(即两片点云的平均“高度”)。如何构造这样的 $f$ 呢?
回顾 $f$ 的作用:给定任意输入$\boldsymbol{x}$(无论是真实图像还是生成图像),输出一个实值“高度” $f(\boldsymbol{x})$。显然,$f$ 应具有可学习的参数,记为 $f_{\boldsymbol{\phi}}$ ;这不就是一个神经网络吗?所以自然地,用神经网络来参数化 $f_{\boldsymbol{\phi}}$。
于是,在对抗训练中:
- 训练 $f_{\boldsymbol{\phi}}$:最大化 $\hat{P}_{\text{data}}$ 和 $\hat{P}_g$ 的高度差——同时强制 $f$ 是 1-Lipschitz(比如用梯度惩罚,见下文);
- 训练 $G_{\boldsymbol{\theta}}$:最小化 $\hat{P}_{\text{data}}$ 和 $\hat{P}_g$ 的高度差(努力让生成样本的平均高度接近真实样本);
众里寻他千百度,蓦然回首,$f$ 竟是判别器!
只是,此“判别器”已非彼判别器:
- 它不再试图判断图像“真 or 假”,而是评估其“高 or 低”;
- 它的输出不是概率值(如 0.9 表示很真),而是一个无界的实值分数;
- 它的优化目标不再是交叉熵或 JS 散度,而是Wasserstein 距离的对偶形式——最大平均高度差。
因此,更准确地说:$f$ 是传统判别器的“升维形态”——从二分类器蜕变为受 1-Lipschitz 约束的连续评分函数,下文把判别器叫做critic,以强调其角色变化!
WGAN 的真正突破不在于“计算 Wasserstein 距离”,而在于:
- 利用 KR 对偶将一个不可导、不可扩展的组合优化问题(EMD)转化为一个连续、可微、可通过神经网络优化的极小极大问题;
- 即使在 $P_{\text{data}}$ 与 $P_g$ 支集不重叠时(如早期生成器很差),critic 仍能提供有意义的梯度方向,避免了传统 GAN 的“梯度消失”问题。
WGAN 的训练技巧与 Lipschitz 约束实现 (4.5)
前面我们要求判别器(critic)函数 $f$ 必须满足 1-Lipschitz 条件,即:
- 任意两点的高度差 $\leq$ 它们的距离
- 等价于:地形的坡度不能超过 1
但问题是:神经网络天生不知道这个规则!它可能画出悬崖峭壁(梯度极大)或平地突起(梯度不连续),违反 1-Lipschitz 约束。
WGAN 原始论文方法是权重裁剪(Weight Clipping),强行把神经网络的所有权重限制在 $[−0.01,0.01]$ 之间。结果:网络能力被严重阉割,训练不稳定,甚至学不会复杂地形。
现在的主流解决方案是梯度惩罚(Gradient Penalty, WGAN-GP):既然 1-Lipschitz 要求梯度(即坡度)的范数 $\leq$ 1,那我们就直接检查坡度!具体做法:
Critic(即判别器 $f$)的训练目标是:最大化高度差 $\mathbb{E}_{\text{data}}[f] - \mathbb{E}_g[f]$,也就是最小化 $-(\mathbb{E}_{\text{data}}[f] - \mathbb{E}_g[f])$;
构造新的目标函数:
$$
Loss_{\boldsymbol{\phi}} = -(\mathbb{E}_{\text{data}}[f_{\boldsymbol{\phi}}] - \mathbb{E}_g[f_{\boldsymbol{\phi}}]) + \text{GradientPenalty}
$$
- Critic(即判别器 $f$)的训练目标变成最小化 $Loss_{\boldsymbol{\phi}}$;其中 $Loss$ 的未知参数 $\boldsymbol{\phi}$ 就是 $f$ 的未知参数;
我们在新的目标函数中引入了 $\text{GradientPenalty}$;训练过程中,想办法做到:
- 越违反 1-Lipschitz 约束,$\text{GradientPenalty}$ 越大,损失就越大;
- 越符合 1-Lipschitz 约束,$\text{GradientPenalty}$ 越小,损失就越小;
这就把一个硬性约束($||f||_L \leq 1$)转化为一个软性惩罚项,通过 loss 的增减引导网络自动满足约束。
如何设计 $\text{GradientPenalty}$ ,使得越违反 1-Lipschitz 约束,其值越大;反之越小呢?
本质上,1-Lipschitz 约束就是:任意两点的高度差 $\leq$ 它们的距离。把生成样本(一片点云)抽象成一个点 $\boldsymbol{s}$,把真实样本(另一片点云)抽象成另一个点 $\boldsymbol{r}$;把它们抽象成一维,放在 $x$ 轴上,并使用 $y$ 轴表示它们的高度。
优秀的 $f$ 会让它们的高度差最大,即高度差等于它们之间的距离;也就是,线段 $\boldsymbol{s}$ → $\boldsymbol{r}$ 的斜率恰好等于 1。
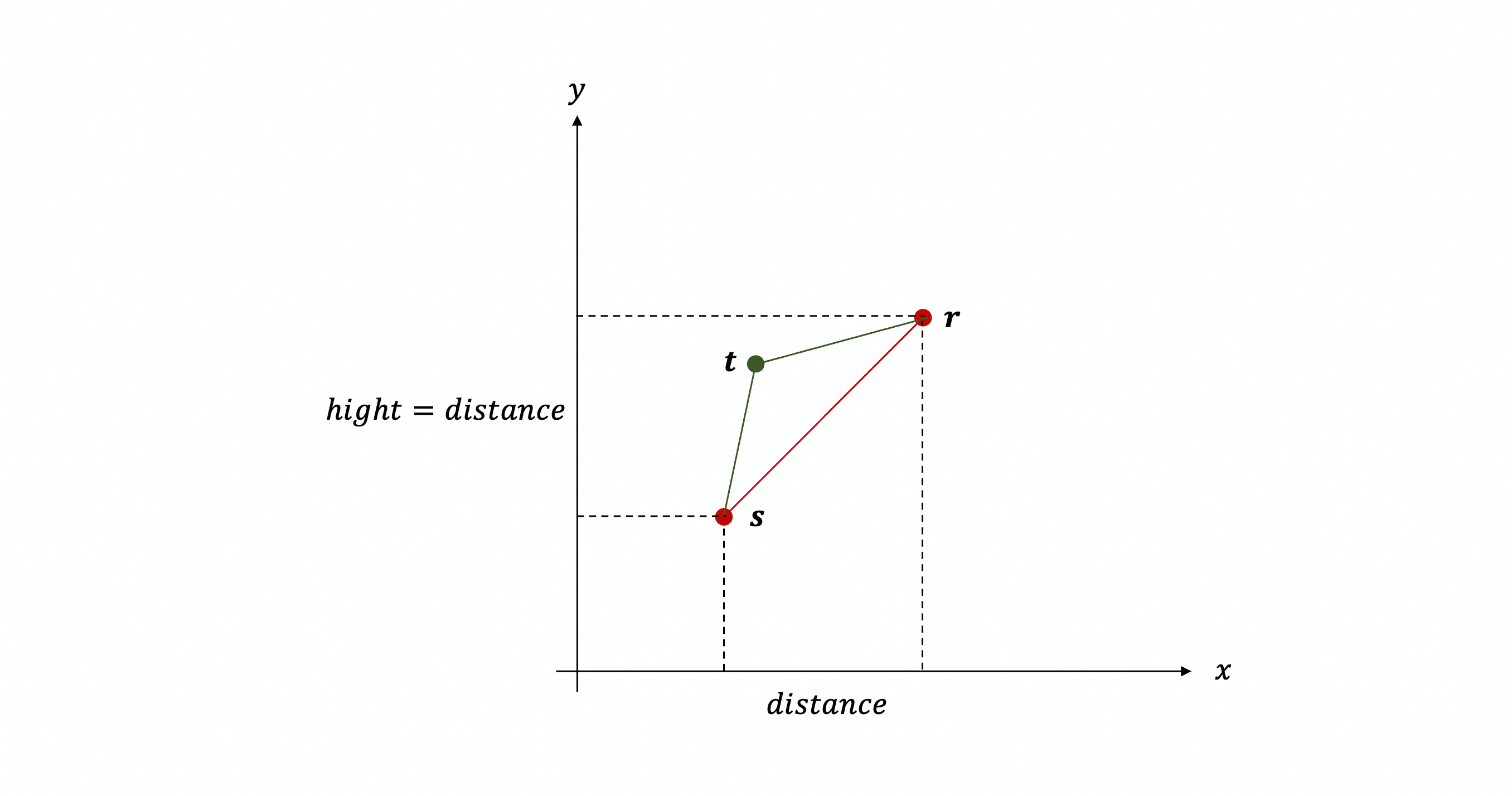
此时 $f$ 够优秀吗?不一定。因为 1-Lipschitz 要求任意两点的高度差都小于等于它们之间的距离,上面只是 $\boldsymbol{s}$ 和 $\boldsymbol{r}$ 这两点满足。假如 $\boldsymbol{s}$ 和 $\boldsymbol{r}$ 之间还有一个点 $\boldsymbol{t}$,使得线段 $\boldsymbol{s}$ → $\boldsymbol{t}$ 的斜率很大,而$\boldsymbol{t}$ → $\boldsymbol{r}$ 的斜率很小,$f$ 依然很糟糕!
假如 $\boldsymbol{t}$ 刚好在线段 $\boldsymbol{s}$ → $\boldsymbol{r}$ 上,即线段 $\boldsymbol{s}$ → $\boldsymbol{t}$ 和 $\boldsymbol{t}$ → $\boldsymbol{r}$ 的斜率都为 1,依然可能存在其它点 $\boldsymbol{t}^\prime$ 使得线段 $\boldsymbol{s}$ → $\boldsymbol{t}^\prime$ 的斜率很大,而$\boldsymbol{t}^\prime$ → $\boldsymbol{r}$ 的斜率很小。
所以,理想情况下,$\boldsymbol{s}$ 和 $\boldsymbol{r}$ 之间的所有点都在线段 $\boldsymbol{s}$ → $\boldsymbol{r}$ 上!或者说,$\boldsymbol{s}$ 和 $\boldsymbol{r}$ 之间的所有点附近的斜率(即所有点的梯度)都为 1;大于 1 或者小于 1,都应该使 $Loss$ 值变大,即都应该产生一个正的 $\text{GradientPenalty}$!
注:梯度小于 1 并不违反 1-Lipschitz 约束,但会导致高度差无法达到最大值,所以也得到惩罚。
注:现实中,两片点云之间,无法存在一个函数使得所有点对之间的高度差都等于距离(两两配对连成线段,它们的斜率基本不可能全为 1);所以,上述“所有点梯度为 1”只是帮助我们建立直觉,并不严谨。
这就是 Gradient Penalty 的核心思想。下面正式描述它:
- 在真实样本($\boldsymbol{x} \sim \hat{P}_{\text{data}}$)和生成样本($\boldsymbol{y} \sim \hat{P}_g$)之间随机插值(每一对点 $(\boldsymbol{x},\boldsymbol{y})$ 连线上随机取一个插值点),得到一批“中间点”(当然不可能枚举所有点,那是无限多的),记为 $\hat{\boldsymbol{x}}$(它表示一个随机变量,每次采样得到一个点):
$$
\hat{\boldsymbol{x}} = \epsilon \boldsymbol{x} + (1 - \epsilon) \boldsymbol{y}, \quad \boldsymbol{x} \sim \hat{P}_{\text{data}}, \boldsymbol{y} \sim \hat{P}_g, \epsilon \sim \text{Uniform}(0,1)
$$
逐一看这些“中间点”,点 $\hat{\boldsymbol{x}}$ 产生的惩罚是:$\lambda \cdot (|| \nabla f_{\boldsymbol{\phi}}(\hat{\boldsymbol{x}}) || - 1)^2$
- $\lambda > 0$ 是一个 hyperparameter,控制惩罚强度,通常设为 10;
- $|| \nabla f_{\boldsymbol{\phi}}(\hat{\boldsymbol{x}}) ||$ 是点 $\hat{\boldsymbol{x}}$ 处的梯度(即 $\hat{\boldsymbol{x}}$ 处的切线的斜率);
- 当梯度为 1,就没有惩罚;
计算总惩罚($\mathbb{E}$ 表示加权平均;因为所有中间点的权重相同,所以就是所有中间点的惩罚的平均值):
$$
\text{GradientPenalty} = \lambda \cdot \mathbb{E}_{\hat{\boldsymbol{x}}}[(|| \nabla f_{\boldsymbol{\phi}}(\hat{\boldsymbol{x}}) || - 1)^2]
$$
- 损失函数
$$
Loss_{\boldsymbol{\phi}} = -(\mathbb{E}_{\text{data}}[f_{\boldsymbol{\phi}}] - \mathbb{E}_g[f_{\boldsymbol{\phi}}]) + \lambda \cdot \mathbb{E}_{\hat{\boldsymbol{x}}}[(|| \nabla f_{\boldsymbol{\phi}}(\hat{\boldsymbol{x}}) || - 1)^2]
$$
Critic(即判别器)就是神经网络 $f$,其训练目标是最小化损失函数 $Loss_{\boldsymbol{\phi}}$。
WGAN 的限制与缺点 (4.6)
- 计算开销大(尤其 WGAN-Gradient-Penalty)
- 对 critic 架构敏感(因为WGAN 要求 critic 是 1-Lipschitz 函数)
- 超参数 $\lambda$ 敏感(WGAN-Gradient-Penalty 特有)
- 理论假设 vs 实践差距
- WGAN 的理论保证依赖于 critic 全局满足 1-Lipschitz;
- 但 WGAN-GP 只在 随机采样的插值点上施加局部约束,无法保证全局 Lipschitz;
- 因此,WGAN-GP 并不能严格实现 Wasserstein 距离,只是一个启发式近似;
- 在某些病态分布上,仍可能出现 critic 梯度爆炸或 loss 异常。
所以,GAN 还有很多变体与优化,DCGAN, StyleGAN, BigGAN 等等。
小结 (5)
在本章中,我们介绍了生成对抗网络(GAN)——一种通过“生成器”与“判别器”相互对抗来学习生成逼真数据的模型。
虽然原始 GAN 概念优美,但在实践中常面临训练不稳定、梯度消失等问题。
为此,我们进一步学习了 WGAN(Wasserstein GAN),它通过使用 Wasserstein 距离替代传统概率散度,并引入 Lipschitz 约束(如梯度惩罚),显著提升了训练的稳定性,还让损失函数具备了实际意义,可用于监控训练进程。
自 GAN 提出以来,研究者们已提出了大量改进方案,例如通过谱归一化(Spectral Normalization)、新型损失函数、条件生成结构等,不断推动生成质量、多样性和训练效率的提升。这些变体构成了丰富而活跃的生成模型生态。

